Studienarbeit
Sensieren von
rotierenden mechanischen Systemen
durch GMR - Sensor
13.
März 2005 – 13. Juni 2005
|

|
in Zusammenarbeit mit der
Fachhochschule Aalen
Hochschule für Technik und Wirtschaft
Studiengang Mechatronik
Beethovenstrasse 1
73430 Aalen
|
|
Student:
Herr Steffen Wahl
Hagkling 26
74417 Gschwend
Matrikelnr.: 20601
|
Betreuer:
Prof.
Dipl.-Phys. Dipl.-Ing. Edmund Schiessle
|
Inhaltsverzeichnis
1 Einführung.. 3
1.1 Ziel
des Projekts. 3
1.2 Ursprung
des GMR-Sensors. 3
1.3 GMR-Effekt 4
1.4 Die
neue Art Magnetfelder zu messen.. 4
1.5 Wirkprinzip.. 5
1.5.1 Aufbau
und Eigenschaften.. 5
1.5.2 Anwendungspotenzial
von GMR-Sensoren.. 5
1.5.3 Messung
magnetischer Felder. 6
1.5.4 Magnetische
Maßstäbe zur Messung von Weg und Winkel 7
1.6 Weg
und Winkelmessung mit MR-Sensoren.. 8
1.7 Inkrementale MR-Messsysteme. 11
1.8 Absolute
MR-Messysteme. 11
2 Magnetfeld.. 12
2.1 Pole
des Magneten.. 12
2.2 Magnetisches
Feld.. 12
2.3 Augenfällige
Wirkung von Magneten.. 13
2.4 Permanentmagnet 15
2.4.1 Grundlagen
von Permanentmagnet 15
2.5 Zusammensetzung
des ausgewählten Stabmagneten.. 16
3 Schaltplanentwurf 16
3.1 Aufbau
auf einer Lochrasterplatine. 16
3.2 Entwurf
Offsetkompensation.. 16
3.3 Entwurf
der Verstärkerschaltung.. 17
3.4 Hauptplatine. 17
3.5 Schaltplan
von Konstanter Stromquelle und Offsetkompensation.. 18
3.6 Schaltplan
von Verstärkerschaltung.. 19
3.7 Layout 19
3.8 Schaltplan
von der Externen GMR-Schaltung.. 20
3.9 Layout 20
4 Mechanischer
Aufbau.. 21
4.1 Schneckengetriebe. 21
4.2 Anordnung
der Magneten auf der Drehscheibe. 22
4.3 Untersuchung
der Positionierung vom GMR-Sensors. 22
4.4 Ausgangssignal GMR-Sensor mit Aufbereitungselektronik. 23
Schlusswort 24
1. Einführung
Die Idee für die Studienarbeit basiert auf mein zweites Praxissemester bei
der Firma TRW Automotive. Aufgrund meiner Tätigkeit im Praxissemester ist mir
aufgefallen, dass man die Winkelmessung eines rotierenden Systems mit einem
Sensor messen kann.
Das Ziel des Projekts ist es, einen Versuchsaufbau für rotierende
Systeme auf der Basis vom GMR - Sensor - zu entwickeln und die mechanische
Umsetzung und den Entwurf von einer Messschaltung.
Der GMR-Effekt wurde zuerst 1988 von Peter Grünberg vom Forschungszentrum Jülich und Albert Fert der Universität Paris-Süd in unabhängiger
Arbeit voneinander entdeckt. Die Möglichkeiten, den Effekt in einem Sensor für
ein magnetische Felder einzusetzen (und damit zu etablieren einen neuen Typ von
Lesekopf
in einer Computerfestplatte), wurden schnell durch ein IBM-Forschungsteam durch Stuart Parkin entdeckt. Er replizierte den
Effekt mit polykristallinen Schichten. IBM stellte im 
 Dezember 1997 das erste
kommerzielle Gerät her, das diesen Effekt nutzte. Derzeitig konzentriert sich
die Forschung auf den Einsatz von mehrschichtigen Sensoren.
Dezember 1997 das erste
kommerzielle Gerät her, das diesen Effekt nutzte. Derzeitig konzentriert sich
die Forschung auf den Einsatz von mehrschichtigen Sensoren.
 Der Ursprung der
Entwicklung von magnetoelektronischen GMR-Elementen ist auf die Entdeckung
einer antiferromagnetischen Kopplung zwischen zwei Fe-Schichten zurückzuführen,
die mittels einer dünnen Cr-Zwischenschicht voneinander getrennt sind. Ohne
äußeres Magnetfeld ist die Magnetisierung der beiden Fe-Schichten antiparallel
orientiert. Durch ein äußeres Magnetfeld, das größer als die
antiferromagnetische Kopplungsstärke ist, wird die antiferromagnetische
Orientierung der Fe-Schichten aufgebrochen und die Magnetisierung beider
Fe-Schichten parallel zueinander ausgerichtet.
Der Ursprung der
Entwicklung von magnetoelektronischen GMR-Elementen ist auf die Entdeckung
einer antiferromagnetischen Kopplung zwischen zwei Fe-Schichten zurückzuführen,
die mittels einer dünnen Cr-Zwischenschicht voneinander getrennt sind. Ohne
äußeres Magnetfeld ist die Magnetisierung der beiden Fe-Schichten antiparallel
orientiert. Durch ein äußeres Magnetfeld, das größer als die
antiferromagnetische Kopplungsstärke ist, wird die antiferromagnetische
Orientierung der Fe-Schichten aufgebrochen und die Magnetisierung beider
Fe-Schichten parallel zueinander ausgerichtet.
 Der Giant MagnetoResistive
Effekt tritt in Schichtsystemen mit mindestens zwei ferromagnetischen Schichten
und einer nicht magnetischen, metallischen Zwischenschicht auf. Stehen in
diesen Schichten die Magnetisierungen nicht parallel zueinander, so ist der
Widerstand größer als bei paralleler Magnetisierung. Dieser Unterschied kann
bis zu 50 Prozent betragen, daher auch der Name “giant“ bzw. “gigantisch“.
Der Giant MagnetoResistive
Effekt tritt in Schichtsystemen mit mindestens zwei ferromagnetischen Schichten
und einer nicht magnetischen, metallischen Zwischenschicht auf. Stehen in
diesen Schichten die Magnetisierungen nicht parallel zueinander, so ist der
Widerstand größer als bei paralleler Magnetisierung. Dieser Unterschied kann
bis zu 50 Prozent betragen, daher auch der Name “giant“ bzw. “gigantisch“.
Die Gleichmäßigkeit der extrem dünnen Schicht ist von großer
Bedeutung für die sensorischen Eigenschaften. Um eine Serienfertigung
zuverlässig zu ermöglichen, sind sehr aufwendige Anlagen notwendig. Daher
begründet sich auch die nur geringe Anzahl an Anbieter von GMR-Sensoren.
Die größten Erfahrung über die zuverlässige Herstellung
präziser GMR-Schichten gibt es bisher nur in der Herstellung von Schreib- und
Leseköpfen für Plattenlaufwerke.
Bei der Suche nach geeigneten Messwertaufnehmer und Sensoren,
haben sich Magnetfeld-Sensoren durchgesetzt. Die Anforderungen steigen
kontinuierlich in Bezug auf:
·
sehr hohe Temperaturstabilität über den gesamten
Temperaturbereich
·
sehr große unverstärkte Ausgangs-Signalpegel
·
sehr hohe Empfindlichkeit
·
geringe Leistungsaufnahme, sowie
·
“0“ – Speed bis 1 MHz Erkennung steigen kontinuierlich
Die GMR-Sensoren bringen den Entwickler einen entscheidenen
Schritt weiter:
Mit GMR-Sensoren kann das Magnetfeld eines Permanentmagneten,
eines Elektromagneten oder das eines Stromes direkt gemessen werden. Durch die
höhere Empfindlichkeit erfüllen GMR-Sensoren die Haupt-Forderungen nach
·
höherem Schaltabstand,
·
hoher Temperaturstabilität,
·
Stillstanderkennung und
·
geringeren Design Kosten
1.5
Wirkprinzip
Der GMR-Effekt tritt in sehr dünnen Schichtsystemen von einigen
Nanometern auf. Der elektrische Widerstand hängt vom Winkel zwischen der oberen
und unteren Magnetisierung ab. Der größte Widerstand entsteht bei
antiparalleler Kopplung zwischen den Schichten.
In der heutigen Applikation werden oft sogenannte Spin-Valve
Schichtsysteme eingesetzt. Ein Spin Valve Schichtsystem besteht aus zwei
weichmagnetischen Schichten, die durch eine nichtmagnetische Schicht getrennt
sind. Die Magnetisierung der weichmagnetischen Schicht wird durch eine
antiferromagnetische Schicht festgehalten.
Die untere weichmagnetische Schicht ist als `free layer` und
die obere als `pinned layer` bekannt. Die antiferromagnetische Schicht heißt `pinning layer`,
die magnetische Schicht ist als Spacer bekannt. Es wurde ein
Sensor im Form von vier Mäanderspulen gefertigt, die in einer Brückenschaltung
geschaltet sind. Der Sensor weist ein GMR-Effekt von 2% auf.
|
Eigenschaften
|
GMR
|
AMR
|
Hall
|
Induktiv
|
|
Temperaturstabilität
|
+++
|
++
|
+
|
++
|
|
Ausgangssignal
|
+++
|
++
|
+
|
Größenabh.
|
|
Empfindlichkeit
|
+++
|
+++
|
++
|
++
|
|
Leistungsverbrauch
|
+++
|
+
|
++
|
Größenabh.
|
|
Größe
|
+++
|
+
|
+++
|
+
|
|
DC-Betrieb
|
Ja
|
Ja
|
Ja
|
Nein
|
|
Kosten
|
+++
|
+
|
+++
|
|
Tabelle
1:
Vergleich alternative Magnetfeldsensoren
In Tabelle 1 werden die Eigenschaften von GMR-Sensoren im Vergleich
zu den herkömmlichen Magnetfeldsensoren, wie z.B. AMR (Anisotropic
MagnetoResistance)-, Hall- und induktive Sensoren dargestellt.
Für die Anwendungvon GMR-Sensoren spricht insbesondere das sehr
große Ausgangssignal, so dass auf eine aufwendige Vorverstärkung des Signals
verzichtet werden kann.
Mit dem großen Ausgangssignal ist eine sehr hohe
Empfindlichkeit verbunden, die Messungen der Erdmagnetfeldstärke ermöglicht.
Bedingt durch die hohe Empfindlichkeit kann – im Vergleich zu herkömmlichen
Sensoren – der Abstand zwischen dem GMR-Sensor und dem Signalgeber vergrößert
werden. Die Materialstabilität lässt einen Einsatz der GMR-Sensoren bei
Temperaturen von 0° bis 150°C zu. Die kleine Baugröße von GMR-Sensoren
ermöglicht ein Herstellungs- und Integrationsverfahren, welches mit der CMOS-
und bipolaren Halbleitertechnologie kompatibel ist. Dies ermöglicht den
einfachen Aufbau von GMR-Sensoren mit integrierten Schaltungen, so dass
intelligente Sensoren zu angemessenen Preisen hergestellt werden.
Allgemein lässt sich sagen, dass AMR-Sensoren bei kleinen
Feldstärken deutlich vorteilhafter anwendbar sind, als beispielsweise Halbleiter-Sensoren
(Feldplatten) oder Hall Sensoren. Bedingt vor allem durch eine um etwa den
Faktor 100 höhere Empfindlichkeit der AMR-Sensoren.

 Eine
typische Anwendung zur Messung von schwachen magnetischen Feldern ist ein
elektronischer Kompass. Das Erdmagnetfeld (ca. 50 A/m (62,5mT)) wird mit zwei
AMR-Sensoren desTyps MF1 ausgewertet, die um 90° gegeneinander verdreht
aufgebaut sind. Aus den beiden Sensorsignalen wird die genaue Richtung des
Erdmagnetfeldes berechnet. Man findet diese Sensoren z. B. in multifunktionalen
Armbanduhren mit elektrischer Kompassfunktion. Eine Anwendung findet man in
potenzialfrei messenden, hochdynamischen Stromsensoren der Serie CMS. Sie
benötigen wegen ihrer hohen Empfindlichkeit keine Flusskonzentratoren und
arbeiten deshalb völlig hysteresefrei. Diese Sensoren sind um ein vielfaches
kleiner als etwa Stromsensoren, die auf dem Hall-Effekt beruhen. Sie sind für
einen hohen Frequenzbereich bi bis ca. 100 kHz einsetzbar
Eine
typische Anwendung zur Messung von schwachen magnetischen Feldern ist ein
elektronischer Kompass. Das Erdmagnetfeld (ca. 50 A/m (62,5mT)) wird mit zwei
AMR-Sensoren desTyps MF1 ausgewertet, die um 90° gegeneinander verdreht
aufgebaut sind. Aus den beiden Sensorsignalen wird die genaue Richtung des
Erdmagnetfeldes berechnet. Man findet diese Sensoren z. B. in multifunktionalen
Armbanduhren mit elektrischer Kompassfunktion. Eine Anwendung findet man in
potenzialfrei messenden, hochdynamischen Stromsensoren der Serie CMS. Sie
benötigen wegen ihrer hohen Empfindlichkeit keine Flusskonzentratoren und
arbeiten deshalb völlig hysteresefrei. Diese Sensoren sind um ein vielfaches
kleiner als etwa Stromsensoren, die auf dem Hall-Effekt beruhen. Sie sind für
einen hohen Frequenzbereich bi bis ca. 100 kHz einsetzbar
Um Winkel und Wege hoch auflösend und genau mittels des
MR-Prinzips zu messen, werden magnetische Maßverkörperungen eingesetzt.
Darunter werden entlang einer Linie (Maßstab) oder im Ring (Polring) angeordnete,
abwechselnd gegensätzlich polarisierente Magnete gleicher Pollänge verstanden.
 Diese magnetischen
Maßverkörperungen werden in Längen von <1 cm bis zu mehreren hundert Metern
oder als Ring in unterschiedlichen Durchmessern passend für die jeweiligen
Messaufgabe hergestellt. Die Pollängen zwischen 0,1 und 5 mm werden durch das
präzise Magnetisieren von dauermagnetischem Material erzeugt.
Diese magnetischen
Maßverkörperungen werden in Längen von <1 cm bis zu mehreren hundert Metern
oder als Ring in unterschiedlichen Durchmessern passend für die jeweiligen
Messaufgabe hergestellt. Die Pollängen zwischen 0,1 und 5 mm werden durch das
präzise Magnetisieren von dauermagnetischem Material erzeugt.
Die Maßstäbe bestehen für Standardanwendungen aus flexiblem
Kunststoffmaterial mit eingelagertem Ferritpulver.
Für höhere Genauigkeiten und mit Blick auf das thermische
Verhalten können auch
Maßstäbe aus keramischen Material beschrieben werden.
Abgeleitet vom Vorgang der magnetischen Datenspeicherung wird dieses
Magnetisieren als “Schreiben“ von Maßstäben bezeichnet. Entsprechend der
jeweiligen Aufgabe werden die Maßverkörperungen oft Hand in Hand mit dem
Anwender an die Messaufgabe angepasst. Beispiele hierfür sind der Magnetring
für einen Encoder in Kleinstmotoren, der Polring für eine Winkelmessung im
hochwertigen Objektiv einer professionellen
Filmkamera.
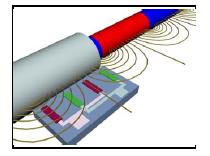
 Ein parallel zur Maßstabsoberfläche
bewegter MR-Sensor ändert sein Ausgangssignal sinusförmig innerhalb einer
Pollänge. Der Sensorchip lässt sich somit zur genauen Ortsbestimmung verwenden.
Diese besteht aus der Zählung der bereits zurückgelegten Perioden und der
Bestimmung der Position innerhalb der Pol-länge. Um das Sensorsignal eindeutig
dem Ort in der gesamten Pollänge zuordnen zu können, bedarf es des Einsatzes
einer zweiten, gleichen Sensorbrücke. Sie ist um ein Viertel der Periodenlänge
zur ersten Brücke versetzt auf dem gleichen Sensorchip angeordnet. Das
Sensorsignal dieser zweiten Wheatstone`schen Brücke verläuft kosinusförmig
innerhalb der Pollänge.
Ein parallel zur Maßstabsoberfläche
bewegter MR-Sensor ändert sein Ausgangssignal sinusförmig innerhalb einer
Pollänge. Der Sensorchip lässt sich somit zur genauen Ortsbestimmung verwenden.
Diese besteht aus der Zählung der bereits zurückgelegten Perioden und der
Bestimmung der Position innerhalb der Pol-länge. Um das Sensorsignal eindeutig
dem Ort in der gesamten Pollänge zuordnen zu können, bedarf es des Einsatzes
einer zweiten, gleichen Sensorbrücke. Sie ist um ein Viertel der Periodenlänge
zur ersten Brücke versetzt auf dem gleichen Sensorchip angeordnet. Das
Sensorsignal dieser zweiten Wheatstone`schen Brücke verläuft kosinusförmig
innerhalb der Pollänge.
Damit ist die Grundlage der Weg- und Winkelmessung mit
MR-Sensoren kurz umrissen.
MR-Sensoren werden als offen abtastende Messsysteme eingesetzt.
 Dabei ist immer der Arbeitsabstand zwischen
Maßstab und Sensor von Interesse. Es geht dabei auf der Anwendungsseite u.a. um
die Empfindlichkeit gegen über Abstandsschwankungen und auf der Sensorseite um
Störfestigkeit. Gute Messergebnisse werden erzielt, wenn der Arbeitsabstand
etwas geringer als die halbe Periodenlänge des jeweiligen Magneten ist. Daraus
ergibt sich der Zusammenhang zwischen Polgröße und Arbeitsabstand. Die Polgröße
bestimmt maßgeblich die geometrische Größe des MR-Sensorchips.
Dabei ist immer der Arbeitsabstand zwischen
Maßstab und Sensor von Interesse. Es geht dabei auf der Anwendungsseite u.a. um
die Empfindlichkeit gegen über Abstandsschwankungen und auf der Sensorseite um
Störfestigkeit. Gute Messergebnisse werden erzielt, wenn der Arbeitsabstand
etwas geringer als die halbe Periodenlänge des jeweiligen Magneten ist. Daraus
ergibt sich der Zusammenhang zwischen Polgröße und Arbeitsabstand. Die Polgröße
bestimmt maßgeblich die geometrische Größe des MR-Sensorchips.
Mit Polgrößen von 1mm und entsprechend 2mm langen Sensorchips
werden Genauigkeiten von wenigen Mikrometer erreicht. Der Arbeitsabstand kann
dann z.B. ohne Genauigkeitsverlust zwischen 0,1mm und max.0,5 mm vom Objekt,
abzüglich der Materialstärke der Sensorabdeckung, schwanken.
In dem abstandsneutralen Verhalten liegt einer der wesentlichen
Vorteile der AMR- und GMR-Sensoren gegenüber den Hall-Sensoren.
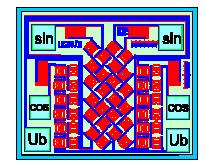
Zusätzlich besitzen MR-Sensoren eine Selbstdiagnose durch den
Aufbau von jeweils zwei Brückenschaltungen auf einem Chip, die um 45°
zueinander angeordnet sind und je ein Sinus- und Cosinus-Signal liefern. Da sin2
+ cos2 = 1 ist das Resultat der Auswertung beider Signale ein
selbst diagnostizierendes Messsystem. Kurz: Die nachfolgende Logik
kann in Abb.7 leicht erkennen, ob der Sensor in Ordnung ist oder ein
Sensordefekt vorliegt.

 Wie in Abb. 8 exemplarisch
dargestellt, werden durch eine Interpolations-ASIC die beiden analogen Sinus-
und Kosinus-Signale MR-Sensors in digitale Signale – auch als A/B-Signale
bezeichnet – umgewandelt.
Wie in Abb. 8 exemplarisch
dargestellt, werden durch eine Interpolations-ASIC die beiden analogen Sinus-
und Kosinus-Signale MR-Sensors in digitale Signale – auch als A/B-Signale
bezeichnet – umgewandelt.
 Anhand
des A/B-Signals kann nach dem Einschalten des Systems erst durch das Anfahren
einer Referenzposition eine Zuordnung der aktuellen Position zu einer absoluten
Position gemacht werden. Bei dem abgebildeten System werden die Flanken des
digitalen Signals gezählt. Die Auflösung ist der Abstand zwischen zwei Flanken.
Die Messlänge hängt von dem eingesetzten Zähler und dem Maßstab ab.
Anhand
des A/B-Signals kann nach dem Einschalten des Systems erst durch das Anfahren
einer Referenzposition eine Zuordnung der aktuellen Position zu einer absoluten
Position gemacht werden. Bei dem abgebildeten System werden die Flanken des
digitalen Signals gezählt. Die Auflösung ist der Abstand zwischen zwei Flanken.
Die Messlänge hängt von dem eingesetzten Zähler und dem Maßstab ab.
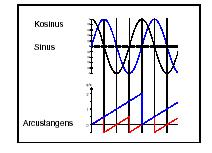
 Die beiden Signale des MR-Sensors
werden typischerweise mit dem Arcustangensverfahren in eine Länge umgerechnet.
In Abb. 9 ist der Zusammenhang zwischen den sinusförmigen Sensorsignalen und
der berechneten Arcustangensfunktion dargestellt. Wie zu sehen ist, werden die
einzelnen Stücke der Arcustangensfunktion zu einer Geraden ohne Sprünge
zusammengesetzt. Die Position der berechneten Wegstrecke ist nur innerhalb
eines Pols eindeutig. Wenn der zurückgelegte Weg länger als eine Periode ist,
kann bei einspurigen Systemen die zurückgelegte Wegstrecke nicht eindeutig
einem Pol zugeordnet werden und die Gesamtlänge nicht als ein Wert dargestellt
werden.
Die beiden Signale des MR-Sensors
werden typischerweise mit dem Arcustangensverfahren in eine Länge umgerechnet.
In Abb. 9 ist der Zusammenhang zwischen den sinusförmigen Sensorsignalen und
der berechneten Arcustangensfunktion dargestellt. Wie zu sehen ist, werden die
einzelnen Stücke der Arcustangensfunktion zu einer Geraden ohne Sprünge
zusammengesetzt. Die Position der berechneten Wegstrecke ist nur innerhalb
eines Pols eindeutig. Wenn der zurückgelegte Weg länger als eine Periode ist,
kann bei einspurigen Systemen die zurückgelegte Wegstrecke nicht eindeutig
einem Pol zugeordnet werden und die Gesamtlänge nicht als ein Wert dargestellt
werden.
Will man über einen längeren Messweg als um eine Pollänge
absolut messen, bedarf es eines zweiten Sensors. Die zweite Spur wird
noniusartig versetzt zur ersten Spur magnetisiert. Der absolute Weg kann nun
über die Arcustangensfunktion aus der Phasenverschiebung beider Spuren
berechnet werden. Auf diese Weise lassen sich z. B. mit einer absoluten
Wegmessung bis zu 335cm realisieren.
Die Stellen der stärksten Anziehung nennt man die Pole des
Magneten.
Die magnetische Wirkung nimmt entlang des Magneten mit der
Entfernung von den Polen ab. In der Mitte zwischen den Polen ist keine
magnetische Wirkung mehr vorhanden.
Einen Magneten kann man sich aus mehreren Elementarmagneten
zusammengesetzt denken. Diese Elementarmagneten entstehen durch
Elektronenspins. In ferromagnetischen Stoffen sind die Elektronenspins
auch in nicht magnetisiertem Zustand innerhalb kleiner
Bereiche, der sogenannten Weißschen Bezirke, gleich ausgerichtet. Diese Bezirke
können als Elementarmagneten angesehen werden. Nur ferromagnetische Stoffe
bestehen aus solchen Elementarmagneten.
Je mehr Elementarmagnete in einem Eisenstück ausgerichtet sind,
desto größer ist seine magnetische Wirkung.
Die durch die Eisenfeilspäne dargestellten Linien heißen
magnetische Feldlinien. Den Raum um einen Magneten, in dem magnetische Kräfte
wirken und den man sich von magnetischen Feldlinien durchsetzt denkt, nennt man
magnetisches Feld.
Üben Körper aufeinander Kräfte aus, ohne sich zu berühren, so
spricht man von einem Kraftfeld zwischen diesen Körpern.
Nach der Ursache der Kräfte unterscheidet man magnetische
Felder, elektrische Felder und Schwerefelder.
Man hat für die magnetischen Feldlinien folgende Richtung
festgelegt:
Magnetische
Feldlinien verlaufen außerhalb des Magneten vom Nordpol zum Südpol, innerhalb
vom Südpol zum Nordpol. Der Nordpol eines beweglichen Magnetfeld, es zeigt in
die so festgelegte Feldlinienrichtung.
Wenn man zwei
Magneten mit gleichartigen Polen (N und N oder S und S) einander gegenüber und
streuen Sie Eisenfeilspäne auf die Glasplatte, ist das Ergebnis das die
Feldlinien gleichartiger Pole einander ausweichen.
Wenn man nun mit
ungleichartigen Polen (N und S) den Versuch aufbaut, ist das Ergebnis, dass die
Feldlinien verlaufen bogenförmig zwischen den ungleichartigen Polen der beiden
Magneten verlaufen.
Aufgrund der
Erkenntnis der Versuche, kann man den Feldlinien folgende Eigenschaften
zuschreiben: Sie neigen sich verkürzen (Längszug), streben in Querrichtung
auseinander (Querdruck) und treten senkrecht aus dem Magneten aus.
Zwischen den
Polen verlaufen die Feldlinien eng beieinander. Eng nebeneinander liegenden
Feldlinien, also große Feldliniendichte, bedeutet, dass dort die magnetische
Kraftwirkung groß ist. Großer Abstand der Feldlinien, also kleine
Feldliniendichte, bedeutet, dass dort nur kleine magnetische Kräfte wirken.
Ein magnetisches
Feld mit parallelen Feldlinien gleicher Dichte nennt man ein homogenes
(gleichmäßiges) Feld.
Aufgrund dieser
Erkenntnisse ist es also wichtig, den GMR-Sensor so zu positionieren, dass die
magnetische Feldlinien parallel zum GMR-Sensor verlaufen. Somit erhält man ein
gleichmäßiges Signal.
Wie allgemein bekannt besitzt ein Stabmagnet
zwei, in Anlehnung an die Erde normalerweise als Süd- und Nordpol bezeichnete
Enden, auch Pole genannt. Hat man zwei Magnete, so ziehen sich Nord- und Südpol
an, während sich gleiche Pole abstoßen, ohne dass man hierzu Energie zuführen
muß. Auf dieser Basis funktionieren auch Kompaßnadeln: Es handelt sich um
kleine, sehr leichte, beweglich gelagerte Magnete, die sich üblicherweise im
Magnetfeld der Erde ausrichten und aufgrund ihrer Ausrichtung eine Information
über das umgebende Magnetfeld liefern.
Abb.10:Wirkung von Magneten aufeinander
Indem man z.B. auf einen mit vielen Kompaßnadeln versehenen Karton einen
Stabmagneten legt, kann man die Auswirkungen des starken Magnetfelds eines
Magneten auf die Umgebung d.h. die schwachen Magnetfelder der Kompaßnadeln
studieren. Mit einer Reihe von Kompaßnadeln kann man also Magnetfelder
"sichtbar" machen. In Abb.12 ist dies anhand einer Graphik
verdeutlicht.
Abb.11:Das Magnetfeld
Die Kompaßnadeln richten sich hierbei an den magnetischen Feldlinien aus, von
denen in roter Farbe vier Stück exemplarisch eingezeichnet sind.
Es handelt sich hierbei um gedachte Linien,
denn sehen kann man sie selbstverständlich nicht.
Wie aber funktionieren Permanentmagnete?
Ein auch als Dauermagnet bezeichneter Permananentmagnet erzeugt ein Magnetfeld,
ohne dass man einen Stromfluß erkennbar ist. Trotzdem arbeitet auch ein
Permanentmagnet mit Strom; allerdings muß dieser nicht von außen zugeführt
werden. Ein Permanentmagnet besteht aus vielen sehr kleinen Elementarmagneten,
die durch eine Ansammlung von Atomen gebildet werden. Bei jedem Atom umkreist
mindestens ein Elektron den Atomkern. In Abb.13 ist dies anhand eines
Wasserstoffatoms, welches nur ein einziges Elektron besitzt und damit das am
einfachsten gebaute Atom darstellt, dargestellt.
Abb.12: Das Magnetfeld eines Wasserstoffatoms
Dieses eine Elektron wirkt genauso wie weiter oben beschrieben ein
elektrischer Strom durch z.B. einen Kupferdraht und erzeugt durch seine
Bewegung ein magnetisches Feld. Denn der elektrische Strom entspricht der
Bewegung von Elektronen. Sind sie überrascht, dass Wasserstoffatome magnetisch
sind? Nun, das Gas Wasserstoff ist in seiner Gänze nicht magnetisch, auch wenn
die einzelnen Atome Magnetfelder erzeugen und damit magnetisch sind. Der Grund
liegt darin, dass Wasserstoffatome sich völlig ungeordnet bewegen und sich
daher in Summe die Magnetfelder der einzelnen Atome kompensieren. Denn
statistisch gesehen sind zu jedem Zeitpunkt genausoviele Magnete in die eine
Richtung ausgerichtet wie in die entgegengesetzte. Es handelt sich daher, wie
auch die Erfahrung bestätigt, bei Wasserstoff nicht um einen Permanentmagneten
Aufgrund des Datenblattes des
GMR-Sensors ist es am geeignesten,
einen Magneten auszuwählen, der ein sehr starkes Magnetfeld aufbaut.
Die Magnete aus seltenen Erden
(Kobaltsamarium Neodym-Eisen-Bor) stellen das technologisch fortschrittlichste
Produkt dar, das heute auf dem Markt ist.
Das Sam-Co, das schon seit 1980 im
Handel ist, wird langsam aber sicher durch das Neodym ersetzt, das leistungsstärker
und weniger zerbrechlich ist, aber auch weniger kostet. Kobaltsamarium wird
trotzdem noch dort empfohlen, wo die
Temperatur 180°C überschreiten. Da es sich um leicht rostendes Material
handelt, sind die Neodymmagnete normalerweise durch Zink-, Nickel-, Epoxidbäder
oder anderes geschützt. Das Neodym entwickelt eine 7-10 mal höhere
Leistungsfähigkeit als die herkömmlichen magnetischen Materialien.
Als erstes wurde die Schaltung auf dem
Lochrasterplatine aufgebaut um die Funktion zu testen. Die Bauteile werden nach
Schaltplan auf der Lochrasterplatine aufgebaut. Der nächste Schritt ist die
Einstellung des Offsetabgleichs.
Danach wird am IC1 das Sinus und das Kosinus-Signal mit dem
Oscilloskope erfasst um zu schauen ob das Signal vorhanden ist und ob Störungen
auftreten.
In Bezug auf die Argumentation in
Kapitel 2.5 wird eine Schaltung entworfen, bei der man den Offset kompensieren kann (Nullabgleich). Laut dem
Datenblatte des GMR-Sensors der Firma Hy-Line ist es am sinnvollsten den,
GMR-Sensor mit einem Strom zu betreiben.
Als weiter zu verarbeitendes Signal wird
ein Spannungssignal benötigt. Dies bedingt das ein Strom fließt, der die Brücke
konstant speist. Bei einer Verstimmung der Brücke durch magnetischen Einfluss
ergibt sich ein Variables Spannungssignal des Brückenstrom beträgt 1mA.
Um das Ausgangssignal zu verstärken, ist
eine entsprechende Verstärkerschaltung vorgesehen. Wie eine Simulation mit
Hilfe des Schaltungsentwicklungsprogrammes Multisim zeigt, ist eine
Verstärkung, insbesondere zur Erziehlung eines optimalen
Signal-Rausch-Abstandes, von V=30 zu empfehlen.
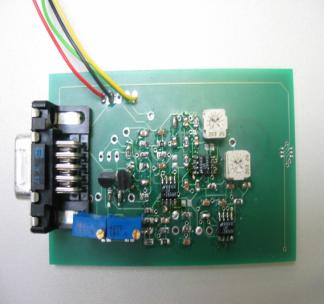 Die Hauptschaltung aus drei
Teilbereichen. Zunächst die Schaltung für die Einstellung des Offsets des
Eingangssignals. Es wird eine Präzisions Stromquelle ausgewählt aufgrund des
Temperatureinflusses. Für das Sinus und Kosinus-Signal ist jeweils eine
Stromquelle gewählt worden, damit man die beiden Eingangssignale von einander
unabhängig einstellen kann. Der zweite Teil der Schaltung ist die erste
Verstärkerstufe. Die Verstärkerstufe besteht aus einem Tiefpassfilter, wo die
Aufgabe hat, die Störeinflüsse wie Schwingungen und Rauschen zu filtern. Die
letzte Teilschaltung besteht aus einem Differenzverstärker mit einem
Trimmwiderstand, womit man die Verstärkung einstellen kann. Hier ist eine
Verstärkung von 30 realisiert worden. Damit man noch flexibler den GMR-Sensor
einsetzen kann, ist noch eine zusätzliche Platine entwickelt worden, die aus
einer Konstanten Stromquelle und dem Sensor besteht. Durch den Vorwiderstand
der Stromquelle, fliest ein konstanter Strom von 1mA. Somit kann man die
Platine auf die Vorrichtung des Testaufbaus fixieren und die Ausgangssignale
nach außen führen, unabhängig von der Hauptplatine.
Die Hauptschaltung aus drei
Teilbereichen. Zunächst die Schaltung für die Einstellung des Offsets des
Eingangssignals. Es wird eine Präzisions Stromquelle ausgewählt aufgrund des
Temperatureinflusses. Für das Sinus und Kosinus-Signal ist jeweils eine
Stromquelle gewählt worden, damit man die beiden Eingangssignale von einander
unabhängig einstellen kann. Der zweite Teil der Schaltung ist die erste
Verstärkerstufe. Die Verstärkerstufe besteht aus einem Tiefpassfilter, wo die
Aufgabe hat, die Störeinflüsse wie Schwingungen und Rauschen zu filtern. Die
letzte Teilschaltung besteht aus einem Differenzverstärker mit einem
Trimmwiderstand, womit man die Verstärkung einstellen kann. Hier ist eine
Verstärkung von 30 realisiert worden. Damit man noch flexibler den GMR-Sensor
einsetzen kann, ist noch eine zusätzliche Platine entwickelt worden, die aus
einer Konstanten Stromquelle und dem Sensor besteht. Durch den Vorwiderstand
der Stromquelle, fliest ein konstanter Strom von 1mA. Somit kann man die
Platine auf die Vorrichtung des Testaufbaus fixieren und die Ausgangssignale
nach außen führen, unabhängig von der Hauptplatine.
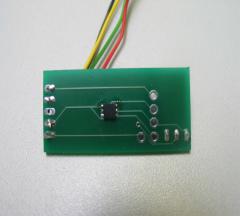
Abb.13:Hauptplatine
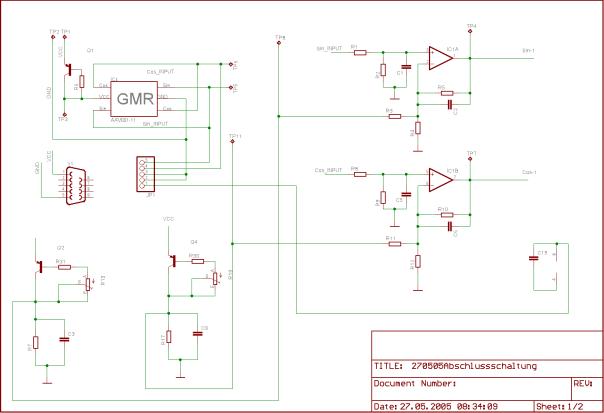
Abb.14:Gesamt-Schaltplan
Vorverstärkung: A = R5 / R4 = 5,3
A = R10 / R12 = 5,3
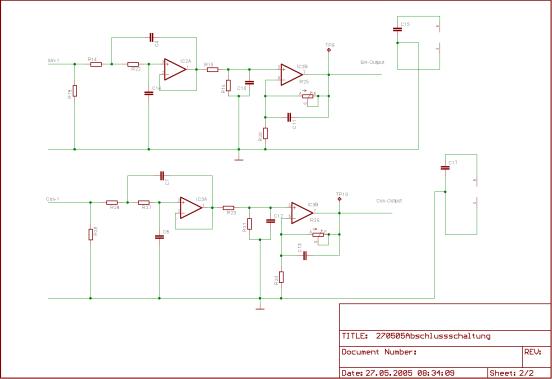
Abb.15:Verstärkerschaltung
Variable Verstärkung: A = R25 / R24 = 0...6,3
A =
R26 / R20 = 0...6,3
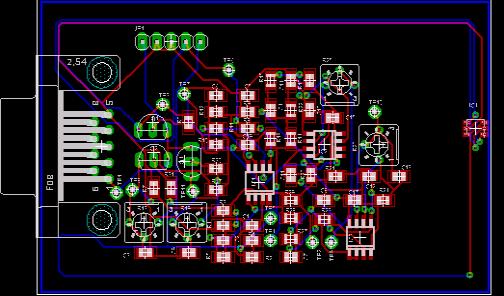
Abb.16:Platinelayout der Hauptschaltung
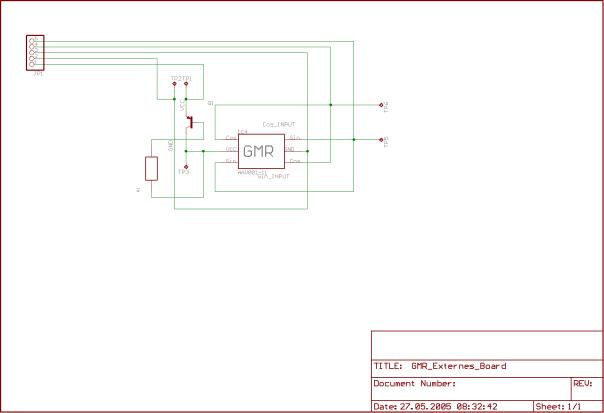
Abb.17:Externe-GMR-Schaltung
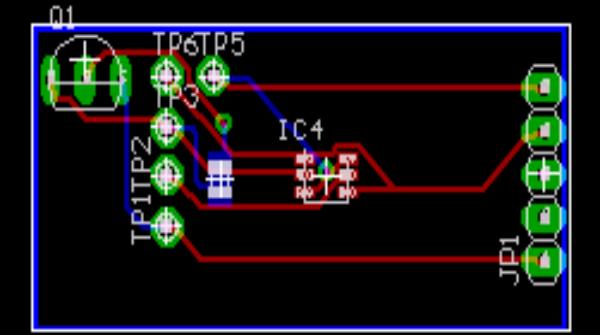
Abb.18:Platinelayout der externe GMR-Schaltung
 Beim Mechanischen Aufbau werden
Teile benutzt, die das Magnetfeld nicht beeinflussen. Es werden Nichtmetalle
und Kunststoffe für den Testaufbau.
Beim Mechanischen Aufbau werden
Teile benutzt, die das Magnetfeld nicht beeinflussen. Es werden Nichtmetalle
und Kunststoffe für den Testaufbau.
Die Nichtmetalle haben nicht nur den Vorteil, dass sie das
Magnetfeld nicht ablenken bzw. beeinflussen, sondern es hat auch für die
Weitervearbeitung einige Vorteile, wie z.B. das Aluminium sich leichter und
besser Fräsen und Bohren lässt als z.B. Edelstahl. Auch das Gewicht des
Versuchsaufbaus ist somit auch niedrig. Als Werkstoffe für die Drehscheibe
wurde Polyamid verwendet, da es von der Festigkeit am besten geeignet ist.
Die Schnecke ist eine Sonderform eines schrägverzahnten
Zahnrades. Der Winkel der Schrägverzahnung ist so groß, dass ein Zahn sich
mehrfach schraubenförmig um die Radachse windet. Der Zahn wird in diesem Fall
als Gang bezeichnet. Es gibt eingängige
oder mehrgängige Schnecken. Für diesen Modellaufbau wurde eine
eingängige Schnecke ausgewählt. Aufgrund dessen, das eingängige Schnecken
selbsthemmend sind, kann das Schneckenrad nicht gedreht werden. nicht gedreht,
sondern wird durch die Schnecke blockiert. Das bedeutet, dass mit einem
Schneckengetriebe
Die Drehzahl nur stark reduziert und nie erhöht werden kann.
Dies hat diesen Vorteil, das man kaum ein Spiel hat und somit die Drehscheibe
eine genaue Position einnehmen kann. Das Gegenstück zur Schnecke ist das
Schneckenrad. Die rotatorischen Achsen der Schnecke und des Schneckenrades sind
zueinander um 90° verdreht. Das Übersetztungsverhältnis berechnet sich aus der
Gangzahl und der Zähnezahl des Schneckenrades.
Nur mehrgängige Schnecken können auch nichtselbsthemmend sein.
Das ist stark von der Reibung zwischen Schnecke und Schneckenrad abhängig.
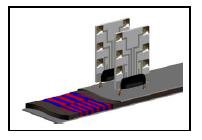
Bei der Anordnung der Magneten auf der Drehscheibe stand die
Funktion und die Signalaufnahme des GMR-Sensors im Vordergrund. Der GMR-Sensor
sollte sich im homogenen Magnetfeld befinden, damit man zwei saubere
Ausgangssignale bekommt. Aufgrund der Erkenntnisse sind zwei Drehscheiben mit
unterschiedlicher Positionierung der Magnete gefertigt worden. Bei der ersten
Drehscheibe sind die Magnete möglichst nah an der Achse positioniert worden und
sind zueinander im Winkel von 45° (siehe Abb.19) angeordnetr. Die zweite
Drehscheibe ist so aufgebaut, dass 5 Magneten senkrecht und nebeneinander
positioniert sind (siehe Abb.:20).


4.3
 Untersuchung der Positionierung vom
GMR-Sensors
Untersuchung der Positionierung vom
GMR-Sensors

 Die Zusatzplatine des GMR-Sensors
kann durch die Vorrichtung in 3 Achsen (x, y, z-Achse) eingestellt werden.
Einmal kann die Vertikale (y-Achse) eingestellt werden, dann die Horizontale
(x-Achse) und das Drehen um die x-Achse für die Neigung (Abb.:21)
Die Zusatzplatine des GMR-Sensors
kann durch die Vorrichtung in 3 Achsen (x, y, z-Achse) eingestellt werden.
Einmal kann die Vertikale (y-Achse) eingestellt werden, dann die Horizontale
(x-Achse) und das Drehen um die x-Achse für die Neigung (Abb.:21)
Der Sensor muss eben aus seine Platine gelötet sein, damit man
zwei gleiche Amplituden von den Ausgangssignale erreicht
Der Versuchsaufbau lässt sich einmal per Hand oder motorgetrieben betreiben. Bei
Motorbetrieb entspricht die Drehzahl der Frequenz des Ausgangssignals.
Die Funktionen der Aufbereitungselektronik ermöglichen den
Abgleich des elektrischen Ausgangssignals bezüglich Offset und Amplitude.
Mit den Signalen lässt sich zu einem die Drehzahl des
Versuchsaufbaus bestimmen,
zum anderen mit Hilfe der angegebenen Formel zu jeder Zeit
die genaue Winkelposition der Drehscheibe errechnen.
Abb.22:Oszilloskopaufnahme; Offseteinstellung 0V,
Amplitudeneinstellung 3V, Drehfrequenz ca. 0,2Hz
Als Ergebnis der Studienarbeit entstand ein Versuchsaufbau für
rotatorische Systeme mit Hilfe eines GMR-Sensors.
Bezüglich des Schaltungsaufbaus und der Spannungsversorgung
besteht noch Raum für Verbesserung:
Durch Verwendung von SMDs und durch räumliche Optimierung des
Layouts könnten die Ausmaße der Störeinflüsse noch erheblich verbessert werden.
Dies war aber nicht Bestandteil der Aufgabenstellung und hätte den zeitlichen
Aufwand der Studienarbeit nochmals erheblich erhöht.
Danksagung
Am Ende des Berichts möchte ich mich bei Herrn Prof. Edmund
Schiessle für die Betreuung während der Bearbeitung dieser sehr interessanten
Studienarbeit bedanken. Es wurde mir ermöglicht, meine Kenntnisse und
Fertigkeiten in den Bereichen Elektronik und Sensorik zu erweitern und zu
festigen. Vor allem die Umsetzung der
Mechanik und Sensorik waren sehr
Interessant.