FACHHOCHSCHULE
AALEN
Hochschule für Technik und
Wirtschaft
FACHBEREICH OPTIK UND
MECHATRONIK
STUDIENGANG MECHATRONIK
Studienarbeit
SS 2004
Thema:
Bioelektronischer
Puls-Sensor
von
Matthias Adam und Matthias
Bross
Betreuung
Prof.
Dipl.-Phys. Dipl.-Ing.
Edmund R. Schiessle
Inhaltsverzeichnis
1 Anlagenverzeichnis. 2
2 Einführung. 3
2.1 Aufgabenstellung.. 3
2.2 Anwendungsbereiche der Schaltung.. 3
2.3 Rahmenbedingungen.. 4
3 Möglichkeiten der Sensierung. 5
3.1 Sensorprinzip.. 5
3.2 Die Fingerspitze zur Messung des
Puls. 5
4 Beschreibung der Schaltung. 7
4.1 Pulsabnehmer. 7
4.2 Pegelanpassung.. 10
4.3 Auswertung.. 12
4.4 Anzeige. 15
5 Beschreibung der Software. 18
5.1 Funktion des Programms. 18
5.1.1 Externer Interrupt 19
5.1.2 Timer – Funktion. 20
5.1.3 Funktion „Berechnung“ 21
5.1.4 Funktion „Ausgabe“ 22
5.2 Flussdiagramm... 23
5.2.1 Flussdiagramm 1 (Gesamtablauf): 24
5.2.2 Flussdiagramm 2 (Ausgabe –
Funktion): 25
6 Leiterplattenentwicklung. 26
6.1 Layoutentwicklung mit Orcad
Capture. 26
7 Spannungsversorgung. 28
8 Inbetriebnahme der Schaltung. 29
9 Mechanischer Einbau der Platine. 33
10 Normen VDE.. 34
11 Schlusswort 35
12 Danksagung. 36
Anlage
A: Gesamtschaltplan
Anlage B: Bauteilliste
Anlage C: Oszilloskopbilder
Anlage D: Quellcode des Programms
Anlage E: Layout und Bestückungsplan
Anlage F : Zeichnung
der Fingerklammer
Anlage G :
Datenblätter ( nur auf CD – ROM )
Im Rahmen einer Studienarbeit im 8. Semester im Studiengang
Mechatronik haben wir eine Schaltung zur bioelektronische Pulsmessung mit Hilfe
von optoelektronischen Bauelementen realisiert.
Die Aufgabenstellung für dieses Projekt haben wir von Herrn
Prof. Dipl.-Phys. Dipl.-Ing. Edmund R. Schiessle erhalten, der auch in den folgenden Wochen das Projekt
betreute.
Die Hauptaufgabe bestand zuerst darin eine Schaltung
aufzubauen, die die von
optoelektronischen Bauelementen aufgenommenen Pulsschläge entsprechend
aufbereitet, um sie auf dem Oszilloskop sichtbar darzustellen.
Nachdem dieser Aspekt erledigt war erweiterten wir die
Schaltung nach Absprache mit Herrn Schiessle um einen Logik- und Anzeigeblock ,
um die Anzahl der Pulsschläge pro Minute für den Anwender sinnvoll
darzustellen.
Der Logikblock wurde mit Hilfe eines Mikrocontrollers der
Firma Atmel realisiert, für den ein
Programm zur Auswertung der einzelnen Impulse
geschrieben werden musste.
Die Spannungsversorgung der Schaltung erfolgt über ein
externes Labornetzgerät.
Für die Leuchtdiode und den Phototransistor
(optoelektronischer Sensor) war eine Halterung zu konstruieren, um diese
bestmöglich an einem Körperteil zu fixieren.
Die Gesamtschaltung wurde auf einer selbstentworfenen
Platine aufgebaut und zu Vorführzwecken aus Gründen des Berührungsschutzes
zwischen zwei Plexiglasplatten montiert.
Neben der Realisierung der Gesamtschaltung war es Ziel
dieses Projekts, theoretisches Wissen zu vertiefen und anzuwenden.
Auch die Planung und
Organisation des Gesamtaufwandes
spielte hierbei eine wesentliche Rolle.
Zur Entwicklung der Schaltung war die Einarbeitung in
Capture (OrCad, Layout Plus, etc.) nötig.
Zur Erstellung der Software (Programm) für den
Mikrocontroller haben wir auf die Programmiersprache ANSI C und einen Compiler
der Firma Keil zurückgegriffen.
Die Aufgabe der Schaltung besteht im Wesentlichen darin,
Pulsschläge optisch aufzunehmen, sie auszuwerten und auf einer 7-Segmentanzeige
in Pulsschläge pro Minute auszugeben. Die Messzeit beträgt dabei jedoch keine
Minute, sondern nur wenige Sekunden
(abhängig von der Pulsfrequenz).
Der Aufbau kann sowohl im Klinikbereich, sowie auch zu Hause
oder beim Sport zur Überwachung der Pulsfrequenz benutzt werden.
Die Bedienung des Gerätes ist kinderleicht. Die Messung des
Pulses beginnt sofot nach Einschalten des Gerätes und sie wird zyklisch
aktualisiert.
Die Studienarbeit musste in den Einrichtungen der
Fachhochschule Aalen durchgeführt
werden.
Der Zeitraum zur Bearbeitung des Projektes umfasste das
Sommersemester 2004 bis zum Abgabetermin, den 14. Juni 2004.
Den Abschluss der Studienarbeit bildet eine Präsentation am
21. Juni 2004.
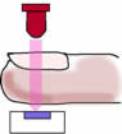
Ein optisches Sensierverfahren macht sich die Tatsache zu
nutze, dass sich die Transmission bzw. die Reflektivität des menschlichen
Fingers durch das Ansteigen des Blutdrucks im Finger ändert. Das Herz pumpt während
des Herzschlags Blut in das Gefäßsystem, erhöht damit einerseits den Blutdruck
und damit natürlich auch die Blutmenge in den Gefäßen. Ein optischer Sensor
detektiert also die relative Schwankung der Blutmenge im Finger.
Eine durchblutete Körperstelle wird von einer Lichtquelle
durchleuchtet und das restliche Licht von einem Fototransistor aufgenommen.
Dieses Licht verändert seine Stärke, da die beleuchtete Hautstelle im Rhythmus
des Herzschlages schubweise mit Blut versorgt wird und dadurch einmal ein
größerer und einmal ein kleinerer Teil des eingestrahlten Lichts verschluckt
wird. Der Fototransistor misst also das
schubweise Fließen des Blutes durch die Körperstelle.
Aus verschiedenen Versuchsreihen haben sich schnell die
bestgeeignetsten Körperteile für eine optische Pulsmessung
herauskristallisiert. Zu ihnen gehören neben den Ohrläppchen die Fingerspitzen.
Vor allem am Daumen und Zeigefinger lässt sich der Puls sehr gut messen, da
diese Bereiche stark durchblutet werden. Auch die Temperatur der Gliedmaßen
spielt für den Erfolg der Messung eine wichtige Rolle. Kalte Finger bedeuten
nämlich, dass die Blutzirkulation nicht gerade gut funktioniert und somit ein
Messergebnis nur schwer zu erlangen ist.
Wir haben für unser Projekt den Daumen als Körperteil
gewählt, da wir an ihm die besten Signale erhielten.
Zwei grundsätzlich verschiedene Lösungsansätze der optischen
Messung sind möglich:
Ø Messung
des Durchlichts durch den kleinen Finger:
Eine Lichtquelle (z.B. eine LED) durchstrahlt den kleinen
Finger.
Das transmittierte Licht wird mit einem geeigneten
Fotoempfänger gemessen.
(Die Messung ist auch seitlich
möglich)
Ø Messung
des Reflexlichts durch den Daumen:
Eine Lichtquelle (z.B. eine LED)
beleuchtet den Daumen.
Das vom Daumen (Fingernagel)
reflektierte Licht wird mit einem geeigneten Fotoempfänger gemessen.

Unser Aufbau beschäftigt sich im weiteren mit der
Reflexlichtmethode, da die von uns gewählten Bauteile (LED und Fototransistor)
mit diesem Prinzip bei uns selbst am besten harmonieren.
Testreihen mit verschiedenen Versuchspersonen haben jedoch
gezeigt, dass die Durchlichtmethode am kleinen Finger allgemein am besten
funktioniert. Bei manchen Personen konnte mit der Reflexmethode überhaupt kein
Puls festgestellt werden.
Aus diesem Grund haben wir für jede Methode einen
professorischen Halter konstruiert, welche die Diode und den Fototransistor
aufnehmen und am Körperteil fixieren.
Die komplette Schaltung des Pulsmessers setzt sich
grundsätzlich aus vier Teilschaltungen zusammen. Jede Teilschaltung wurde
separat entworfen und schließlich zu einem Komplettsystem zusammengesetzt.
Der so entstandene Anfangsentwurf wurde im Laufe der
Weiterentwicklung ständig optimiert und entsprechend den gestellten
Anforderungen angepasst.
Die vier Teilschaltungen können wie folgt beschrieben
werden:
Ø Pulsabnehmer
Ø Pegelanpassung
Ø Auswertung
Ø Anzeige
In den folgenden Kapiteln werden sie separat dargestellt und
näher erklärt.
Die Spannungsversorgung der Schaltung erfolgt durch ein
Labornetzgerät, da zum Betrieb drei verschiedene Versorgungsspannungen nötig
sind. Der Aufbau eines eigenen Netzgerätes wäre einerseits realisierbar
gewesen, andererseits wurde er jedoch aus Zeitgründen eingestellt.
Der Schaltungsteil „Pulsabnehmer“ hat die Aufgabe die
geringen, durch Helligkeitsschwankungen hervorgerufenen Spannungsänderungen zu
verstärken und sie zur anschließenden Weiterverarbeitung aufzubereiten.
Der Fototransistor mit dem Arbeitswiderstand R2 wird über
den Vorwiderstand der Leuchtdiode mit einer konstanten Spannung von ca. 1,6V
versorgt. Helligkeitsänderungen, hervorgerufen durch die Blutzirkulation, beim
Durchleuchten eines Körperteils machen den Fotowiderstand mehr oder weniger
leitend. Bei stärkerer Beleuchtung wird der Fototransistor leitender und
umgekehrt.
Hierbei auftretende Spannungsänderungen werden dem folgenden
nichtinvertierenden Verstärker über C5 zugeführt. Der Kondensator C5 und sein
Entladewiderstand R11 dienen dabei der gleichstrommäßigen Entkopplung.
Das Ausgangssignal von U1D wird einem Tschebyscheff –
Tiefpass 4. Ordnung zugeführt, der eine Grenzfrequenz von ca. 25Hz hat.
Anschließend wird das Signal durch einen invertierenden
Verstärker noch weiter verstärkt. Die Verstärkung dieser Stufe lässt sich über
ein Potentiometer stufenlos zwischen 10 und 100 einstellen.
Dieses Signal wird nun der Nächsten Teilschaltung zugeführt.
Blockschaltbild:
Schaltung:
Da die Ausgangsspannung des Pulsabnehmers eine
Wechselspannung mit Impulsen ist, muss sie für die Weiterverarbeitung am
Mikrocontroller aufbereitet werden.
Die Ausgangsspannung der Teilschaltung Pulsabnehmer hat je
nach Empfindlichkeit des gemessenen Pulsschlages Spannungsspitzen bis zu 15V,
sie hat aber auch negative Anteile. Ideale Pegel für den Mikrokontroller sind
0V und 5V. Die Wechselspannung muss also in ein Rechtecksignal mit 0V und 5V
moduliert werden (Impulsformer).
Um die Flanken des Pulsschlages auszuwerten haben wir aus
einem Operationsverstärker einen Schwellwertschalter (Schmitt – Trigger)
aufgebaut, dessen Schaltschwellen bei +/- 0,5V liegen. Für die Wechselspannung
bedeutet dies, dass alle Spannungswerte oberhalb von 0,5V zu 15V (+Uss) werden und alle Spannungswerte unterhalb von -0,5V
-15V (–Uss) werden.
Aus diesem Rechtecksignal kann jetzt leicht eine
Rechtecksignal mit 0V- und 5V-Pegel gemacht werden:
Ø Mit
Hilfe einer Diode in Reihe werden aus –15V
0V.
Ø Eine
Z-Diode mit Vorwiderstand begrenzen 15V
zu 4,7V.
Ø Der
Widerstand R15 wirkt als Pull – Down – Widerstand für die anschließende
Schaltung.
Um dem Anwender seinen Puls optisch darzustellen verwenden
wir eine zusätzliche Leuchtdiode. So weiß er genau, ob die Klammer mit dem
Fototransistor und der Leuchtdiode richtig an seinem Finger platziert ist und
Pulssignale eintreffen.
Da der Schmitt – Trigger den nötigen Strom für die
Leuchtdiode nicht liefern kann, haben wir einen zusätzlichen Transistor
spendiert, der als Schalter arbeitet und die Leuchtdiode kann somit über einen
Vorwiderstand direkt an 5V Versorgungsspannung betrieben werden.
Berechnungsformeln für den Schmitt – Trigger:
Ue
ein = - R12/R13
* Ua min
Ue
aus = - R12/R13
* Ua max
DUe = R12/R13 * (Ua max – Ua min)
Bockschaltbild:
Schaltung:
Die Auswertung der aufgenommenen Impulse erfolgt mit Hilfe
eines Mikrocontrollers der Firma Atmel. Der Mikrocontroller hat eine 80C51 –
Architektur. Die genaue Bezeichnung ist AT89C51RB2.
Wir haben diesen Controller vor allem aus drei Gründen
ausgewählt:
1.
Der Mikrocontroller hat integrierten RAM
2.
Der Mikrocontroller verfügt über genügend Programmspeicher
3.
Der Programmspeicher ist in Flash – Technologie
(wiederbeschreibar)
Die technischen Hauptmerkmale dieses Mikrocontrollers sind:
Ø Vier
8-Bit Ein-/Ausgabe Ports
Ø Drei
16-Bit Timer
Ø 16k
Byte Flash-Speicher
Ø 1k
Byte RAM
Ø 40MHz
Taktfrequenz
Ø 9
Interrupt - Quellen mit vier Prioritätsstufen
Ø SPI
Schnittstelle
Ø Serielle
Schnittstelle (UART)
Ø Watchdog
Timer
Die Aufgabe des Mikrocontrollers besteht darin, Impulse über
einen externen Interrupt – Eingang aufzunehmen. Nachdem der erste Impuls
empfangen wurde startet der Controller einen Timer. Der Timer läuft genau
solange, bis exakt 5 Impulse detektiert wurden. Anschließend wird der Timer
gestoppt und die verstrichenen Zeit mit der Anzahl der Pulse verrechnet. Da die
Zeit für eine Inkrementierung des Timers bekannt ist (abhängig von der
Taktfrequenz), kann somit auf die Pulsschläge pro Minute geschlossen werden.
Zuletzt gibt der Controller das Ergebnis an die Anzeigeeinheit weiter, die
dieses für den Benutzer graphisch darstellt.
Um all diese Vorgänge abzuarbeiten benötigt der
Mikrocontroller ein Programm, welches von uns erstellt wurde. Die genaue
Funktionsweise soll jedoch im Kapitel „Programmierung des Mikrocontrollers“
erklärt werden.
Die einzige Beschaltung, die ein Controller benötigt sind
ein Quarz und zwei Keramikkondensatoren, die als Taktsignal fungieren.
Da der Mikrocontroller über eine serielle Schnittstelle
verfügt haben wir die Schaltung um einen seriellen Schnittstellentreiber von
Maxim (Max232) erweitert, um das Programm auf den Controller zu übertragen. Auf
diese Weise kann man sich die Anschaffung eines teueren Programmiergerätes
sparen.
Der Datentransfer geschieht lediglich durch zwei Leitungen
und einen Massebezug. Eine Leitung wird als Receive (RxD), die andere als
Transmit (TxD) bezeichnet.
Über die Receive – Leitung empfängt der Mikrocontroller
Daten von außen (z.B. PC) und über die Transmit – Leitung sendet der
Mikrocontroller Daten nach außen (z.B. PC).
Der Anschluss an den PC wird über eine gängige serielle COM
– Schnittstelle und ein Nullmodemkabel
gemacht. Der 9 – polige D – SUB – Stecker auf unserer Platine musste dafür
entsprechend belegt werden.
Blockschaltbild:
Schaltung:
Die Anzeigeeinheit besteht aus drei 8-Bit Schieberegistern
und drei 7-Segmentanzeigen. Die Ausgänge eines Schieberegisters sind immer
direkt mit den LEDs einer 7-Segmentanzeige verknüpft, d.h. eine
7-Segmentanzeige ist für die Hunderter-Ziffer, eine für die Zehner-Ziffer und
eine für die Einer-Ziffer der Anzahl der Pulsschläge pro Minute zuständig.
Jedes Schieberegister hat einen Dateneingang (Data), einen
Takteingang (Clock), einen Übergabeeingang (Strobe) und acht Ausgänge (Q1 –
Q8). Ein weiterer Ausgang Qs hat direkte Verbindung mit Q8 und kann zur
Datenübergabe an ein anderes Bauteil benutzt werden.
Da nur ein Ausgansport des Controller zur Datenausgabe
benutzt wird, werden die Daten mit jedem Clock innerhalb des Schieberegisters
weitergeschoben. Verbindet man den Qs - Ausgang des ersten Schieberegisters mit
dem Dateneingang des nächsten, so kann man die Anzeige kaskadieren. Die Daten
werden also aus dem ersten
Schieberegister hinaus und in das nächste hineingeschoben, usw..
Da jedes Schieberegister vor seinem Ausgang ein Latch
geschaltet hat werden die Daten nicht sofort an der 7-Segmentanzeige
ausgegeben, sondern sie sind nur innerhalb des Bauteils präsent. Erst nachdem
ein Impuls über den Strobe-Eingang erfolgt ist, werden die Daten direkt an den
Ausgängen Q1 – Q8 für die 7-Segmentanzeigen bereitgestellt. Die Anzeige
leuchtet auf und gibt die Anzahl der Pulsschläge pro Minute auf der dreistelligen
7-Segmentanzeige aus.
Mit drei Anzeigen können die Zahlen 0 bis 999 dargestellt
werden. Dies ist vollkommen
ausreichend, da ein Puls von über 220 kaum erreicht wird.
Beim Aufbau der Anzeige ist vor allem wichtig, dass man die
Daten zuerst in das Schieberegister,
das mit der Anzeige für die Einer – Ziffer verbunden ist schiebt, da man sonst
das Ergebnis in spiegelbildlicher Anordnung erhält.
Blockschaltbild:
Schaltung:
Damit der Mikrocontroller korrekt oder überhaupt arbeitet
benötigt er ein Programm, welches er zyklisch abarbeitet.
Der Quellcode für unsere Software musste speziell für die
Anwendung als Pulsmesser in der Sprache ANSI C erstellt werden.
Die Programmiersprache ANSI C haben wir anstelle von
Assembler gewählt, da die Berechnungsformel zur Bestimmung der Pulsschläge pro
Minute nur mit sehr großem Aufwand in Assembler zu erstellen gewesen wäre.
Unser Programm beschäftigt sich hauptsächlich mit dem Umgang
externer Interrupts, Timerfunktionen und einer Ausgabefunktion. Die
Rechenfunktion ist relativ primitiv, da Multiplikationen und Divisionen in C
kein Problem sind.
In diesem Abschnitt beschreiben wir das gesamte Programm, um
die komplette Funktion besser zu verdeutlichen.
Die Funktionsweise und das Zusammenspiel der einzelnen
Unterfunktionen sollen jedoch in den folgenden Kapiteln näher beschrieben
werden.
Für die verschiedenen Aufgaben haben wir einzelne Funktionen
geschrieben, die bei Bedarf vom Hauptprogramm aufgerufen werden. So bleibt das
Gesamtprogramm klar strukturiert und überschaubar.
Beschreibung:
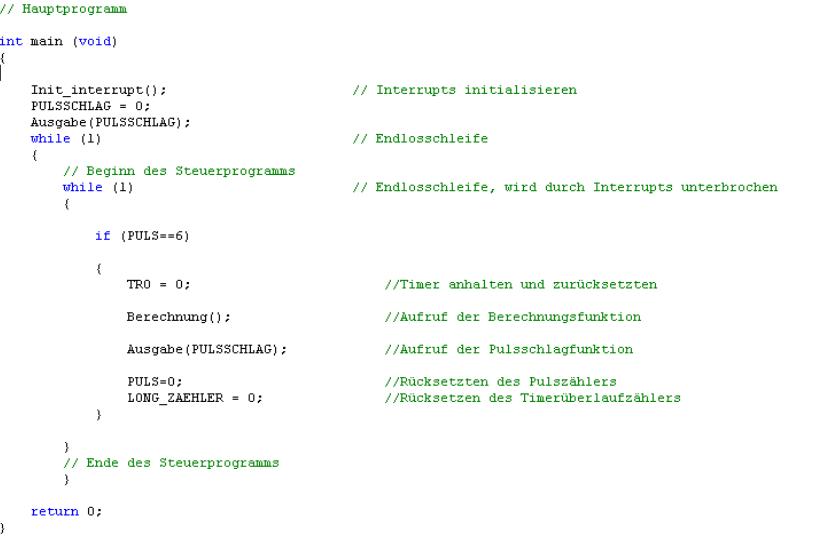
Wie in jedem Programm befindet sich am Beginn ein
Programmkopf, der allgemeine Informationen zum Projekt, dem Datum und den
Autoren enthält.
Danach folgt das Einbinden der Header – Datei (#
include...), wodurch Variablen feste Speicheradressen zugewiesen werden
(special functin register SFR).
Jetzt folgt die Deklaration von Konstanten und globalen
Variablen.
Dann werden die Unterfunktionen „Berechnung“ und „Ausgabe“,
die Initialisierung von Timer und externem Interrupt, sowie ihre Funktionen
selbst deklariert.
Erst nachdem all dies geschehen ist beginnt das eigentliche
Hauptprogramm. In diesem wird zunächst
der externe Interrupt initialisiert, d.h. es werden bestimmte Parameter gesetzt
und die Variable „Pulsschlag“ wird auf Null gesetzt.
Als nächstes wird das Unterprogramm „Ausgabe“ aufgerufen, um
den Inhalt von Pulsschlag (derzeit noch „000“) auf der Anzeige auszugeben. Ist
das Unterprogramm „Ausgabe“ vollständig abgearbeitet, erfolgt der Rücksprung
ins Hauptprogramm und die „000“ bleibt an der Anzeige bestehen.
Im Hauptprogramm wird nun auf das Eintreffen des ersten
externen Interrupts gewartet. Nachdem dieser eingetroffen ist springt das
Programm in die Interrupt – Subroutine und erhöht dort die globale Variable, in
der die Anzahl der eintreffenden Pulsschläge festgehalten wird um eins.
Anschließend wird die Timerfunktion initialisiert, wodurch auch hier bestimmte
Parameter festgelegt werden. Der Timer wird danach gestartet.
Die Initialisierung und der Start des Timers wird jedoch nur
durchgeführt, wenn es sich um den ersten Pulsschlag (= erster externer
Interrupt) handelt. Falls der Timer schon läuft, d.h. es sich nicht mehr um den
ersten Pulsschlag handelt wird diese Option übersprungen.
Anschließend wartet das Programm auf den nächsten Interrupt
und falls dieser eintrifft wird die Variable für die Anzahl der Pulsschläge
inkrementiert.
Nachdem eine vordefinierte Anzahl von Pulsschlägen (5 Stück)
eingetroffen ist wird der Timer angehalten und die Unterfunktion „Berechnung“
aufgerufen. Hier wird aus dem Inhalt des Timers (=Zeit) und der vordefinierten
Anzahl der Pulsschläge über einen Dreisatz auf die Anzahl der Pulsschläge pro
Minute geschlossen.
Nun erfolgt wiederum der Rücksprung ins Hauptprogramm und
die „Ausgabe“ – Funktion wird aufgerufen. In dieser wird durch eine geschickte
Schleifenkonstruktion die berechnete Anzahl der Pulsschläge pro Minute seriell
über einen einzigen Port an die Anzeigeeinheit ausgegeben.
Schließlich gelangt man ins Hauptprogramm zurück, wo alles
von neuem beginnt.
Wie oben schon versprochen werden nun in den folgenden
Kapiteln die Funktionen „externer Interrupt“, „Timer“, „Berechnung“ und
„Ausgabe“ ausführlicher erklärt.
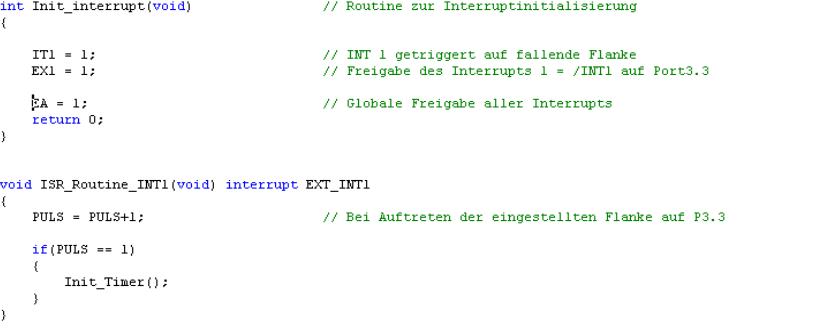
Zur schnellen Reaktion auf Prozessereignisse bietet ein
Mikrocontroller die Möglichkeit Programmunterbrechungen, sog. Interrupts,
einzusetzen. Im Gegensatz zum Unterprogrammaufruf erfolgt der Aufruf des
Interrupt – Unterprogramms somit in der Regel asynchron zum eigentlichen
Programmablauf, zu einem nichtvorhersagbaren Zeitpunkt.
Bei unserem Projekt bot sich ein externer Interrupt für die
Erfassung der Pulsschläge an.
Externe Interrupts werden über doppeltbelegte Ports in den
Mikrocontroller geführt.
Der von uns ausgewählte Controller besitzt zwei externe
Interrupts, von denen wir Interrupt 1 gewählt haben (beliebig).
In unserem Programm wird zuerst die Interrupt – Funktion deklariert.
Danach muss der externe Interrupt initialisiert werden. Bei
der Initialisierung werden bestimmte
Parameter (= Bits im Interrupt SFRs ) gesetzt:
Ø Triggerung
auf steigende oder fallende Flanke
Ø Freigabe
des Interrupts
Ø Globale
Freigabe aller Interrupts
In der Interrupt – Subroutine stehen nun die eigentlich
abzuarbeitenden Befehle.
In unserem Fall werden hier die externen Ereignisse gezählt
und der Timer initialisiert und gestartet, falls es sich um den ersten,
ankommenden Impuls handelt.
Blockschaltbild:
(allgemeine
Darstellung)
Der Mikrocontroller von Atmel besitzt drei integrierte
Hardware – Timer. Dies sind spezielle Timerbaugruppen, die unabhängig von der Zentraleinheit
Zeit - oder Ereigniszählfunktionen ohne Belastung des Steuer – und Rechenwerks
umsetzen können. Nach Ablauf einer eingestellten Verzögerungszeit wird der
Sprung in die Timer – Unterfunktion ausgelöst, in der weitere Aufgaben
abgearbeitet werden.
Der Vorteil liegt insbesondere darin, dass innerhalb der
Verzögerungszeit andere Steuer – und Rechenaufgaben abgearbeitet werden können.
Alternativ lässt sich ein Timer auch softwaretechnisch durch
verschachtelte Programmschleifen realisieren.
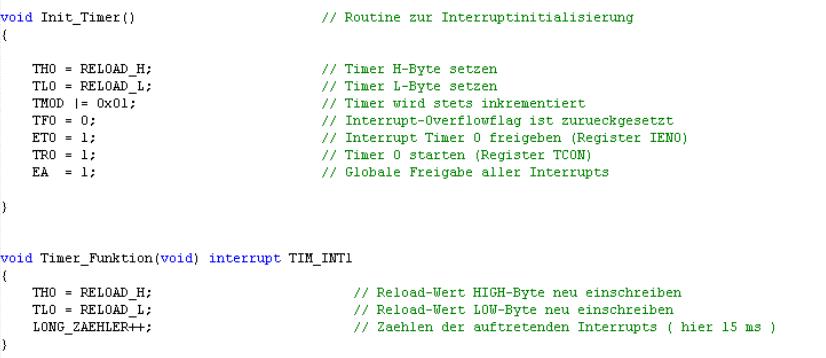
In unserem Programm haben wir den Timer 0 als Zeitbasis für
die Bestimmung der Anzahl der Pulsschläge pro Minute verwendet.
Zuerst muss wiederum die Timer Funktion zu Beginn des
Programms deklariert werden. Danach muss die Timer - Funktion initialisiert
werden. Bei der Initialisierung werden
bestimmte Parameter (= Bits im Timer SFRs ) gesetzt:
Ø Setzen
des Timer High – Byte und Low – Byte
Ø Timer
soll inkrementiert werden
Ø Zurücksetzen
des Überlauf – Flags
Ø Timer
0 freigeben
Ø Timer
0 starten
Ø Globale
Freigabe alle Interrupts
Das setzen des High – und Low – Bytes des Timers ist von
besonderer Bedeutung, da es sich bei allen Timern des Mikrocontrollers um 16 –
Bit – Timern handelt. Seine Architektur erlaubt ihm jedoch nur 8 - Bit - breite
Datenworte zu verarbeiten. Aus diesem Grund werden die 16 Bit in ein High – und
ein Low – Byte aufgeteilt und zusammengesetzt.
Wir setzen das High – Byte auf 0xC6 und das Low – Byte auf
0x62. Der Timer zählt somit hexadezimal von 0xC662 auf 0xFFFF hoch. Der Wert
0xC662 mag auf den ersten Blick etwas willkürlich gewählt sein. Bei einer
Taktfrequenz von 12MHz benötigt der Zähler jedoch ziemlich genau 15ms um einmal
hochzuzählen. Diese Zeit kann jetzt bequem als Zeitbasis für weitere
Berechnungen verwendet werden. Prinzipiell würde jede beliebige Zeit für
weitere Berechnungen genügen, der Controller hat jedoch enorme Probleme mit
Fließkommazahlen zu rechnen.
Hat der Controller den Wert 0xFFFF erreicht wird eine
Zählvariable (LONG_ZAEHLER) inkrementiert und das High – und – Low – Byte
erneut gesetzt.
Nachdem der Controller seine vordefinierte Anzahl an Impulsen
(5 Stück) über den externen Interrupt erhalten hat wird der Timer gestoppt und
die Anzahl der Überläufe steht in der Variablen „LONG_ZAEHLER“ zur Verfügung.
Das heisst, dass die Zeit „LONG_ZAEHLER“
* 15ms für die vordefinierte Anzahl an Pulsschlägen verstrichen ist.
Die Berechnungsfunktion ist eine sehr einfache und kurze
Funktion. Sie hat die Aufgabe aus der Anzahl der Pulsschläge und der dabei
verstrichenen Zeit die Anzahl der Pulsschläge pro Minute zu berechnen. Die
Berechnungsformel ist ein ganz einfacher Dreisatz, der die Anzahl der
Pulsschläge auf 60s bezieht.
Zur Berechnung werden nur globale Variablen benötigt, die
somit nicht übergeben werden müssen. Global bedeutet, dass diese Variablen auch
in anderen Programmteilen und Funktionen verwendet werden.
In der Berechnungsformel wurde jedoch ein kleiner Trick
angewandt. Da der Mikrocontroller mit keinen Fließkommazahlen rechnen kann war
es nötig die Zahlen um entsprechende Zehnerpotenzen zu erhöhen.
Dies hat einen weiteren Vorteil. Bei der Division entstehen
nämlich als Ergebnis nur ganze Zahlen. Der Controller schneidet alles, was nach
dem Komma stehen würde ab.
Beispiel: Teilt man 5 durch 2, so erhält man als Ergebnis 2
anstelle von 2,5.
Der Fehler ist in diesem Beispiel sehr groß. Sind jedoch die
Zahlen, die man teilen möchte sehr groß, tritt der Fehler erst in der dritten
oder vierten Stelle nach dem Komma auf. Der so entstandenen Fehler ist für
unsere Berechnung keineswegs mehr relevant.
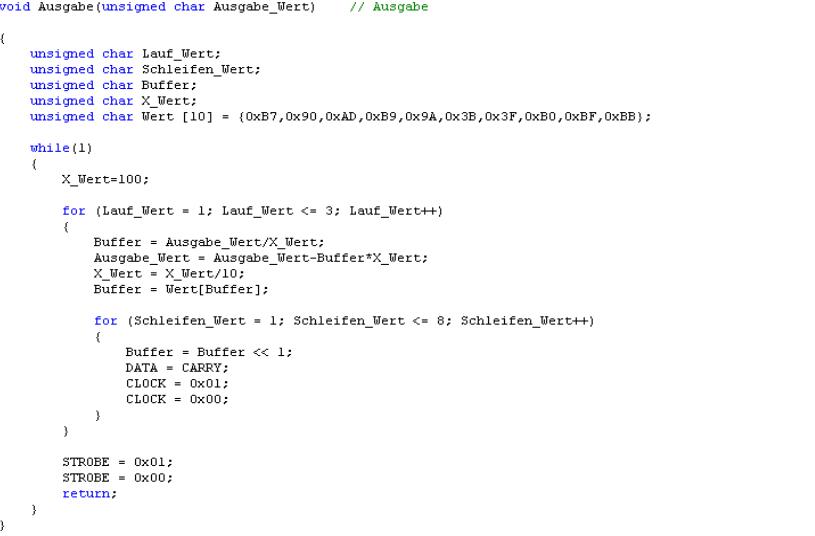
Aufgabe dieser Funktion ist es Ergebnisse (Pulsschläge pro
Minute) an die drei Schieberegister und damit an die 7-Segmentanzeigen seriell
weiterzugeben. Neben globalen Variablen
besitzt diese Funktion auch lokale Variablen, die nur innerhalb der Funktion
verwendet werden können.
Eine besondere lokale Variable ist „Wert“. Sie ist ein
Array, in dem die Bitkombinationen für die Ziffern 0 bis 9 hexadezimal
hinterlegt sind. Soll beispielsweise die Zahl 3 ausgegeben werden, wird auf die
entsprechende Bitkombination aus dem Array zugegriffen. Der Zugriff ist ganz
einfach, da die Zahlen in aufsteigender Reihenfolge hinterlegt sind.
Die „Ausgabe“ – Funktion arbeitet mit 2 ineinandergeschachtelten
FOR – Schleifen.
Die äußere FOR – Schleife wird dreimal abgearbeitet
(Hunderter, Zehner, Einer) und die innere FOR – Schleife achtmal (8 Bit der
Zahl).
Der Ablauf kann folgendermaßen beschrieben werden:
Wir befinden uns im ersten Durchlauf der äußeren Schleife
(Ausgabe der Hunderter – Stelle).
Die Anzahl der Pulsschläge wird zuerst durch Hundert
geteilt. Das Ergebnis ist eine Zahl mit zwei Nachkommastellen. Da der
Controller wie oben beschrieben die Nachkommastellen abschneidet, bleibt eine
ganze Zahl übrig. Diese Zahl wird dazu verwendet, um die richtige Kombination
aus dem Array zu holen
Beispiel: 187 :
100 = 1 à
Array[1] à 0x90 (Kombination für „1“)
Damit der Rest (Nachkommastellen) nicht verloren geht, wird
das Ergebnis wieder mit Hundert multipliziert und vom ursprünglichen Wert
abgezogen. Dieses Zwischenergebnis wird
später für die Zehnerstelle verwendet.
Beispiel: 1 *
100 = 100 ; 187 – 100 = 87(Ergebnis für die Zehner – Stelle)
Jetzt erfolgt der Übergang in die innere FOR – Schleife, die
nun achtmal durchlaufen wird. Bei jedem Durchlauf wird die Bitkombination um
eine Stelle nach links (Richtung MSB)
geschoben, das einzelne Carry - Bit am
Port ausgegeben und ein Taktsignal für das Schieberegister generiert,
damit das Bit übernommen wird.
Nachdem dieser Vorgang beendet ist befinden wir uns im
zweiten Durchlauf der äußeren FOR – Schleife (Ausgabe der Zehner – Stelle). Der
einzige Unterschied zur Hunderter –Stelle liegt im Divisor, der anstatt Hundert
Zehn ist. Gleiches gilt für die Ausgabe der Einer – Stelle.
Wenn die Schleifenkonstruktion abgearbeitet worden ist, wird
schließlich ein Strobe – Signal ausgegeben, was zur Ausgabe des kompletten
Datenpakets aus den Schieberegistern zu den 7 –Segmentanzeigen dient.
Das Layout der Platine wurde mit der Software „Layout Plus“,
einem Programm von Cadence erstellt. Es basiert auf einer Netzliste, deren
Schaltplan mit „Orcad Capture“ kreiert worden ist.
Beide Programme haben wir in einem kleinen Workshop in der
Vorlesung Elektronikentwicklung bei Herrn Wolf kennen gelernt. Bei Fragen und
Problemen rund um das Softwarepaket standen uns auch jederzeit die Mitarbeiter
des EDA – Zentrums beiseite.
Das Layout für die komplette Schaltung mit Analog – und
Digitalteil wurde auf eine handelsübliche Europlatine (160mm x 100mm)
übertragen.
Beim Layout kam es uns vor allem darauf an, dass die vier
verschiedenen Teilschaltungen räumlich voneinander getrennt, jedoch in sich
zusammengehörend auf der Platine aufgebaut wurden. Grund dafür ist
hauptsächlich die Vermeidung von Störeinflüssen durch lange Leitungen.
Den Mikrokontroller haben wir in einer Ecke der Platine
platziert und den Quarz, sowie die Kondensatoren für das Taktsignal ganz dicht
daneben. Auch der serielle Schnittstellentreiber befindet sich aus
Sicherheitsgründen nahe am Controller.
Alle Anschlüsse ( Klemmen und Stecker ) befinden sich am
Rand der Platine, um die Anschlusskabel nicht über die Platine führen zu
müssen.
Bevor die Layoutentwicklung mit Layout Plus stattfinden
kann, muss eine gewisse Vorarbeit geleistet werden.
Zuerst muss ein Stromlaufplan in „Capture“ erstellt werden.
Hierzu ist es nötig passende Bauteile aus Bibliotheken auszuwählen und Footprints zu vergeben. Aus diesen
Informationen wird anschließend die Netzliste erstellt.
Jetzt kann mit der eigentlichen Erstellung des Layouts
begonnen werden.
Zu Beginn wird die Netzliste in das Programm „Layout Plus“
eingelesen. Nun folgt das Verbinden der Footprints. Nachdem die Größe für die
Platine ausgewählt worden ist, werden die einzelnen Bauteile mit den Footprints
auf der Platine platziert. Jetzt können die Verbindungen der Footprints
geroutet werden. Es ist darauf zu achten, dass möglichst wenige
Durchkontaktierungen entstehen. Nachdem die Platine geroutet ist sollten
offenen Verbindungen mit Hilfe des Stromlaufplans nochmals überprüft werden.
Der letzte Schritt ist die Herstellung der Platine.
Die einzelnen Layer der Platine werden auf Pergamentpapier
ausgedruckt (spiegelverkehrt), um die Platine damit zu belichten. Die
Belichtungszeit beträgt ca. 3 Minuten. Nach der Belichtung kann sie in einem Bad
geätzt werden. Beim Ätzen sind folgende
Sicherheitsvorkehrungen zu treffen:
Ø Tragen
einer Schutzbrille
Ø Säurefeste
Handschuhe
Ø Säurefeste
Schürze
Nach dem Ätzbad muss die Platine zuerst gereinigt und dann
mit Lötlack beschichtet werden.
Wenn der Lack getrocknet ist folgt das Bohren für
Durchkontaktierungen und die Montage der Bauteile selbst. Bei der Bestückung
der Bauteile sollte man darauf achten, dass man mit den niedrigsten
(Widerstände und Dioden) beginnt, und sich bis zu den höchsten (Stecker , IC -
Sockel, etc.) durcharbeitet.
Die Spannungsversorgung der Platine wird durch ein externes
Labornetzgerät mit den Festspannungen +15V, -15V, +5V und GND sichergestellt.
Das externe Labor Netzteil hat den Vorteil, dass man sich nicht weiter um VDE –
Vorschriften zu kümmern braucht (Berührungsschutz, usw. ). Außerdem ist die
einwandfreie Funktion sichergestellt.
Aus zeitlichen Gründen wäre der Aufbau eines eigenen,
stabilisierten Netzgerätes mit drei Festspannungen, das sich auf der selben
Platine, wie der Rest der Schaltung befindet nicht realistisch gewesen.
Die Spannungsversorgung wird bequem über eine kleine
Klemmenreihe mit einer vieradrigen Leitung an die Schaltung angeschlossen.
Nachdem die Leiterplatte vollständig aufgebaut worden ist
kann sie in Betrieb genommen werden.
Die Inbetriebnahme soll zunächst ohne ICs und
Mikrocontroller durchgeführt werden (alle Sockel leer).
Zunächst wird die Schaltung auf Sicht mit dem Stromlaufplan
überprüft. Es soll vermieden werden, dass Leitungen zu falschen Pins geführt
worden sind.
Danach werden alle Festspannungen an der Platine
angeschlossen. Nun wird mit dem Oszilloskop die Spannungsversorgung der
einzelnen ICs überprüft. Das Oszilloskop hat den Vorteil, dass man auch
kurzzeitige Spannungseinbrüche feststellen kann.
Falls alles in Ordnung ist, können nun die beiden ICs mit
den vier integrierten Operationsverstärkern für den Analogteil der Schaltung
eingesetzt werden.
Jetzt erfolgt die Überprüfung der Funktion des Pulsabnehmers.
Die Leuchtdiode und der Fototransistor werden an einen
Finger (Daumen) angesetzt. Mit dem Tastkopf des Oszilloskops wird das Signal
vor und nach dem Kondensator C5 betrachtet. Falls hier noch nichts erkannt wird
ist es sinnvoll das Signal hinter dem ersten OP (U1D) anzusehen. Es ist bereits
um den Faktor 600 verstärkt. Hier lässt sich der Pulsschlag schon erahnen. Er
ist jedoch noch etwas unkenntlich, da das Signal von sehr vielen höherfrequenten Schwingungen und Störungen überlagert
wird.
Nach dem Tschebyscheff – Tiefpass 4. Ordnung (U1B und U1A)
kann man den Pulsschlag schon deutlich erkennen. Seine Amplitude ist jedoch
noch ziemlich gering. Diese wird über den invertierenden Verstärker (U1C)
deutlich erhöht. Die Verstärkung kann zusätzlich über das Potentiometer P1
eingestellt werden.
Am Ausgang des Schmitt
- Triggers (U6A) soll aus dem Pulsschlag ein Rechtecksignal mit +/- 15V
entstehen. Das Signal vor und nach dem Schwellwertschalter sollte hierzu
zusammen mit zwei Tastköpfen auf dem Oszilloskop dargestellt werden. Die
anschließende Pegelanpassung muss aus +/- 15V eine Spannung von + 5V und 0V
machen.
Im Anhang der Dokumentation werden die Signale, die an den
verschiedenen Punkten der Schaltung mit dem Oszilloskop abgegriffen werden noch einmal bildlich
dargestellt dargestellt.
Falls der Analogteil der Gesamtschaltung funktioniert können
alle restlichen ICs eingesetzt werden. Zuletzt sollte der Mikrocontroller in
seinen Sockel gedrückt werden, da er gegen statische Aufladung sehr empfindlich
ist und leicht zerstört werden kann.
Über die serielle Schnittstelle kann nun mit einem
Nullmodemkabel und dem Softwaretool
„Flip v 2.2.2“ das Programm auf den Mikrocontroller übertragen werden.
Das Programm wird also in den Flash – Speicher des Controllers geladen.
Die verwendete Version des Softwaretools Atmel – Flip 2.2.2
kann kostenlos von der Homepage der Firma Atmel heruntergeladen werden.
Zuerst wird die Software gestartet und der verwendete
Mikrocontroller selektiert.
Anschließend kann das Software-File, welches bereits im
Hex-Format vorliegen muss, eingelesen werden.
Danach muss die verwendete Schnittstelle, in unserem Falle
die RS232-Schnittstelle, und die entsprechende Baudrate für die Übertragung
angegeben werden. Die Baudrate ist die tatsächlich von der Schnittstelle an
ihren Ein- oder Ausgängen verwendete Datenrate, d.h. die Anzahl der empfangenen
bzw. gesendeten Bits pro Sekunde. In unserem Fall funktioniert eine maximale
Baudrate von 9600. Um mit einer höheren Baudrate Daten übertragen zu können
müsste der Mikrocontroller die übertragenen Daten schneller verarbeiten können.
Dafür würde man allerdings einen Schwingquarz mit einer höheren Frequenz als 12
MHz benötigen.
Wenn man anschließend den Button „Connect“ betätigt,
versucht der PC mit dem Mikrocontroller zu kommunizieren und so eine Verbindung
aufzubauen.
Wurde die Verbindung erfolgreich erkannt, kann der
Flashspeicher je nach Wunsch gelöscht, überprüft, beschrieben und die
geschriebenen Daten verifiziert werden. Ist dies geschehen, so kann über den
Button „Start Applikation“ das Programm auf dem Mikrocontroller gestartet
werden.
Dabei ist allerdings zu beachten, dass bei einem Reset des Mikrocontrollers
oder bei Abschalten der Versorgungsspannung das Programm zwar noch im
Flash-Speicher des Controllers liegt, er es aber nicht mehr selbstständig
starten kann. Hierzu muss wiederum eine Verbindung zum PC hergestellt werden
und erneut der Button „Start Applikation“ gedrückt werden. Dies ist nötig, da
das Programm nach einem Reset nicht automatisch zu der Adresse 0x0000 springt.
Der Mikrocontroller befindet sich nämlich nach dem Beschreiben des
Flash-Speichers im so genannten Bootloaderbereich, in dem er auf weitere
Übertragungen wartet. Das Betätigen des Buttons „Start Applikation“ bewirkt
nur, dass man manuell den Bootloader überspringt.
Um zu umgehen, dass bei jedem neuen Programmablauf der
Bootloader manuell übersprungen werden muss, kann im Tool „Atmel-Flip“ im
Hauptauswahlbildschirm vor BLJB das Häkchen entfernt werden. Dadurch
wird das Bootloader-Jump-Bit aktiviert, das automatisch beim Einschalten der
Versorgungsspannung einen Sprung aus dem Bootloader heraus zur Adresse 0x0000
bewirkt, an der das Programm beginnt. Allerdings kann dieses Häkchen nach
einmaligem Entfernen nicht mehr so ohne weiteres zurückgesetzt werden. Dies
bedeutet, dass kein neues Programm mehr in den Flash-Speicher geladen werden
kann. Dieser Schritt sollte daher erst bei voll-funktionsfähiger Software nach
ausgiebiger Fehlersuche getätigt werden.
Ein erneutes Beschreiben des Controllers wäre zwar
theoretisch noch möglich, allerdings wäre dafür ein spezieller Pegelwandler mit
drei Sende- bzw. Empfangsleitungen nötig. Da man aber davon ausgehen kann, dass
die fertige Schaltung in ihrer Funktion nicht mehr geändert wird, wurde auf
diese relativ komplizierte Interfaceschaltung verzichtet.
Die Platine wird mittels Kunststoffdistanzen zwischen zwei
Plexiglasplatten fixiert. Eine Platte fungiert als Boden, die andere als obere
Abdeckung. Der Einbau gleicht somit eher einem „Testboard“, als einem fertigen
Gerät. Durch die Plexiglasplatten kann die Platine selbst nach dem Einbau von
allen Seiten betrachtet werden. Seitlich bleibt die Konstruktion rundherum
offen.
An der Unterseite sind vier Füße befestigt, um dem Aufbau
einen sicheren Stand zu gewähren.
Da sich die Anzeigeeinheit direkt auf dem Board befindet
wäre es nötig gewesen eine entsprechende Aussparung einzufräsen. Dies hat sich
jedoch durch die Transparenz der Plexiglasplatten ebenfalls erledigt.
Ein weiterer Zweck der Platten ist der primäre
Berührungsschutz der Schaltung. Natürlich ist es möglich die Platine mutwillig
zu berühren, da sie seitlich offen ist.
Diesen Fall schließen wir jedoch aus, da auf der Platine
ausschließlich mit Niederspannungen gearbeitet wird.
Die beiden Plexiglasplatten sollen den gesamten Aufbau
jedoch auch vor äußeren mechanischen Einwirkungen schützen.
Die Fertigung der Cover führten wir in Eigenregie durch.
Schutz sowohl gegen direktes, als auch gegen indirektes
Berühren muss auch in diesem Fall gewährleistet sein. Daher tritt die VDE 0100 Teil
410:1997-01 in Kraft. Sie besagt, dass man den einfachen Fehlerfall mit
Schutzmaßnahmen gegen Spannung, Strom oder Kapazitäten so begrenzen muss, dass
beim Berühren aktiver Teile keine Gefahr für Personen entstehen kann. Das
bedeutet, dass ein Schutz gegen direktes und indirektes Berühren gewährleistet
werden muss.
Dies ist beim Schutz durch SELV (safety extra-low voltage)
und unter bestimmten Bedingungen durch PELV (protective extra-low voltage)
jeweils mit 25V AC (Effektivwert) bzw. 60V DC und beim Schutz durch Begrenzung
von Beharrungsberührungsstrom und Ladung der Fall.
Unter einem Stromkreis ist die Gesamtheit der elektrischen
Betriebsmittel einer Anlage zu verstehen, die von dem selben Speisepunkt
versorgt wird und durch dieselbe Überstromschutzeinrichtung geschützt wird.
Für uns wäre das der Fall, wenn wir unsere Schaltung direkt
an die elektrische Netzversorgung angeschlossen hätten.
(Siehe dazu auch im Kapitel Spannungsversorgung).
Als Ergebnis der Studienarbeit entstand eine Schaltung zur
optischen Pulsmessung mittels eines Fototransistors und einer Leuchtdiode.
Im Rahmen der Studienarbeit wurde die Schaltung um eine
Auswerteeinheit mit Mikrocontroller und eine Anzeigeeinheit mit
7–Segment-Anzeigen erweitert.
Für die den Mikrocontroller musste ein Programm zur
Verarbeitung der empfangenen Pulssignale erstellt werden. Außerdem war eine
Anpassung der Signalpegel zwischen dem Analogteil zur Pulsmessung und dem
Digitalteil mit Mikrocontroller nötig.
Die hier beschriebene Erweiterung der Schaltung wurde
angestrebt, um dem Anwender eine Möglichkeit zu geben seinen Pulsschlag pro
Minute bequem von einer Anzeige abzulesen. Ohne die Auswerteeinheit und
Anzeigeeinheit müsste der Anwender seien Pulsschlag auf dem Oszilloskop
betrachten und über die eingestellte Zeitbasis auf die Anzahl der Pulsschläge
pro Minute hochrechnen.
All diese Aufgaben werden nun vom Mikrokontroller
übernommen.
Vor allem aus Zeitgründen wurde auf den Aufbau eines eigenen
Netzteils verzichtet, und stattdessen die Anzeigeeinheit mit Mikrocontroller
entwickelt. Nicht zuletzt war die Integration eines Controllers und das
Erstellen eines Programms eigenes Interesse, was uns enorm in Zeitdruck
versetzte.
Die fehlende Zeit hat sich daher im Platinenlayout und im
Einbau der Platine niedergeschlagen. Auch die Klammer für den Finger, in der
die Leuchtdiode und der Fototransistor eingebaut ist konnte nicht nach unseren
Vorstellungen umgesetzt werden.
So besteht weiterhin bezüglich Schaltungsaufbau und dem
mechanischen Teil der Aufgabe noch Raum für Verbesserungen.
Abschließend lässt sich jedoch sagen, dass uns die Aufgabe
der Studienarbeit sehr viel Spaß gemacht hat, auch wenn wir uns mit der
Implementierung eines Mikrocontrollers vom Aufwand her gesehen wohl etwas
übernommen haben. Wir haben jedoch gerade in diesem Bereich, vor allem aber in
der Programmierung von Mikrocontrollern eine Menge dazugelernt, was uns in
unserem weiteren Berufsleben viel nützen wird.
Dass uns aus diesem Grund die Zeit zur optimalen Umsetzung
der Aufgabe gefehlt hat bitten wir zu berücksichtigen. Unser Hauptziel war
daher am Ende einen Schaltungsaufbau zu präsentieren, der auch funktioniert.
Den Anwendungsbereich unserer Einheit sehen wir vor allem im
häuslichen Bereich zu täglichen Pulsmessung. Ein weiterer Bereich wäre der
Einsatz in Kliniken zur Pulsüberwachung
nach einer Operation.
Würde man die Schaltung in SMD – Technik, mit einer LCD -
Anzeige und mit speziell dafür angefertigten Chips (z.B. ASIC) aufbauen, könnte
man sich auch die Benutzung beim Sport vorstellen. Das Gerät könnte dann als
Massenprodukt auf den Markt gebracht werden.
Falls die Schaltung als Sportgerät benutzt werden würde,
wäre eine Signalübertragung via Funk wünschenswert, um den Anwender vor
lästigen Kabeln zu bewahren.
Am Ende des Berichts möchten wir uns ganz herzlich bei Herrn
Prof.
Dipl.-Phys. Dipl.-Ing. Edmund R. Schießle für die Betreuung während der
Bearbeitung der sehr interessanten Studienarbeit bedanken.
Es wurde uns ermöglicht selbstständig zu arbeiten, unsere Kenntnisse
und Fertigkeiten in den Bereichen Elektronik und Programmierung zu erweitern
und zu festigen.
Weiterer Dank gilt Herrn Dipl. Ing. M. Holst, der uns bei offenen
Fragen rund um die Programmierung des Mikrocontrollers zur Seite stand.
Aalen, 14. Juni 2004
_______________________ _______________________
Matthias
Adam Matthias
Bross
Anlage A : Gesamtschaltplan
Anlage B : Bauteileliste
|
Nr.
|
Benennung
|
Bauteilbezeichnung
|
Herstellerbezeichnung / Gehäuse
|
Wert
|
|
1
|
R1
|
Metallfilm-Widerstand 0,6 Watt
|
axial
|
300 V
|
|
2
|
R2
|
Metallfilmwiderstand ¼ Watt
|
axial
|
33 kV
|
|
3
|
R3
|
Metallfilmwiderstand ¼ Watt
|
axial
|
1 MV
|
|
4
|
R4
|
Metallfilmwiderstand ¼ Watt
|
axial
|
10 kV
|
|
5
|
R5
|
Metallfilmwiderstand ¼ Watt
|
axial
|
10 kV
|
|
6
|
R6
|
Metallfilmwiderstand ¼ Watt
|
axial
|
1,5 kV
|
|
7
|
R7
|
Metallfilmwiderstand ¼ Watt
|
axial
|
2,2 kV
|
|
8
|
R8
|
Metallfilmwiderstand ¼ Watt
|
axial
|
22 kV
|
|
9
|
R9
|
Metallfilmwiderstand ¼ Watt
|
axial
|
120 V
|
|
10
|
R10
|
Metallfilmwiderstand ¼ Watt
|
axial
|
220 V
|
|
11
|
R11
|
Metallfilmwiderstand ¼ Watt
|
axial
|
47 kV
|
|
12
|
R12
|
Metallfilmwiderstand ¼ Watt
|
axial
|
1 kV
|
|
13
|
R13
|
Metallfilmwiderstand ¼ Watt
|
axial
|
20 kV
|
|
14
|
R14
|
Metallfilmwiderstand ¼ Watt
|
axial
|
10 kV
|
|
15
|
R15
|
Metallfilmwiderstand ¼ Watt
|
axial
|
100 kV
|
|
16
|
R16
|
Metallfilmwiderstand ¼ Watt
|
axial
|
1 kV
|
|
17
|
R17
|
Metallfilmwiderstand ¼ Watt
|
axial
|
1 kV
|
|
18
|
R18
|
Metallfilmwiderstand ¼ Watt
|
axial
|
10 kV
|
|
19
|
R19
|
Metallfilmwiderstand ¼ Watt
|
axial
|
10 kV
|
|
20
|
C1
|
Keramik-Kondensator ungepolt
|
|
6,8 nF
|
|
21
|
C2
|
Keramik-Kondensator ungepolt
|
|
100 nF
|
|
22
|
C3
|
Elektrolytkondensator gepolt
|
radial
|
10 uF
|
|
23
|
C4
|
Elektrolytkondensator gepolt
|
radial
|
100 uF
|
|
24
|
C5
|
Elektrolytkondensator gepolt
|
radial
|
10 uF
|
|
25
|
C6
|
Elektrolytkondensator gepolt
|
radial
|
47 uF
|
|
26
|
C7
|
Keramik-Kondensator ungepolt
|
|
100 nF
|
|
27
|
C8
|
Keramik-Kondensator ungepolt
|
|
100 nF
|
|
28
|
C9
|
Keramik-Kondensator ungepolt
|
|
22 pF
|
|
29
|
C10
|
Keramik-Kondensator ungepolt
|
|
22 pF
|
|
30
|
C11
|
Tantalkondensator gepolt
|
tropfenförmig
|
100 nF
|
|
31
|
C12
|
Tantalkondensator gepolt
|
tropfenförmig
|
100 nF
|
|
32
|
C13
|
Tantalkondensator gepolt
|
tropfenförmig
|
100 nF
|
|
33
|
C14
|
Tantalkondensator gepolt
|
tropfenförmig
|
100 nF
|
|
34
|
C15
|
Tantalkondensator gepolt
|
tropfenförmig
|
100 nF
|
|
35
|
C16
|
Keramik-Kondensator ungepolt
|
|
100 nF
|
|
36
|
C17
|
Elektrolytkondensator gepolt
|
radial
|
47 uF
|
|
37
|
D1
|
Diode
|
1N4148
|
|
|
38
|
D2
|
Zenerdiode
|
BZX 79-C4V7
|
|
|
39
|
D3
|
Leuchtdiode rot
|
Low current, 5mm
|
|
|
40
|
D4
|
Leuchtdiode rot
|
superhell
|
|
|
41
|
D5
|
7-Segment-Anzeige gem. K
|
SC52-11SRWA
|
|
|
42
|
D6
|
7-Segment-Anzeige gem. K
|
SC52-11SRWA
|
|
|
43
|
D7
|
7-Segment-Anzeige gem. K
|
SC52-11SRWA
|
|
|
44
|
Q1
|
Quarz
|
|
6MHz
|
|
45
|
Q2
|
Transistor NPN
|
BC548
|
|
|
46
|
Q3
|
Fototransistor
|
BPW 40
|
|
|
47
|
U1
|
4-fach Operationsverstärker
|
LM 741
|
|
|
48
|
U2
|
4-fach Operationsverstärker
|
LM 741
|
|
|
Nr.
|
Benennung
|
Bauteilbezeichnung
|
Herstellerbezeichnung / Gehäuse
|
Wert
|
|
49
|
U3
|
Schieberegister
|
CD4094BE
|
|
|
50
|
U4
|
Schieberegister
|
CD4094BE
|
|
|
51
|
U5
|
Schieberegister
|
CD4094BE
|
|
|
52
|
U6
|
Serieller Schnittstellentreiber
|
MAX 232
|
|
|
53
|
U7
|
Mikrocontroller Atmel
|
AT89C51RB2
|
|
|
54
|
J1
|
Schraubklemme 3-polig
|
|
|
|
55
|
J2
|
Schraugklemme 4-polig
|
|
|
|
56
|
J3
|
D-SUB Stecker gew., 9-polig
|
|
|
|
57
|
|
Europlatine 160 x 100mm
|
|
|
Anlage C : Oszilloskopbilder
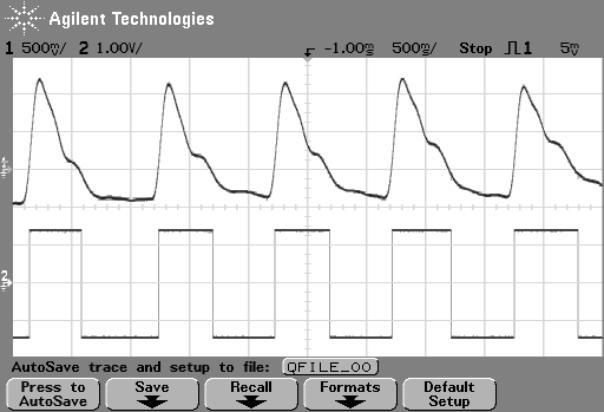
Das Oszilloskopbild zeigt auf Kanal 1 den Pulschlag,
aufgenommen nachdem das Signal den Tschebyscheff – Tiefpass 4. Ornung und den invertierenden
Verstärker am Ende der Teilschaltung „Pulsabnehmer“ passiert hat.
Auf Kanal 2 ist das zugehörige Signal nach dem Schmitt –
Trigger dargestellt, der aus dem Impulssignal ein Rechtecksignal formt.
Die angegebenen Spannungsbereiche sind jedoch um den Faktor
10 zu klein, da die Signale mit einem Tastkopf aufgenommen wurden, der ein
Teilerverhältnis von 10:1 hat. Das von uns benutzte Oszilloskop erkennt diese
Tastköpfe nicht automatisch, und so kommt die Abweichung zu stande.
Anlage C : Oszilloskopbilder
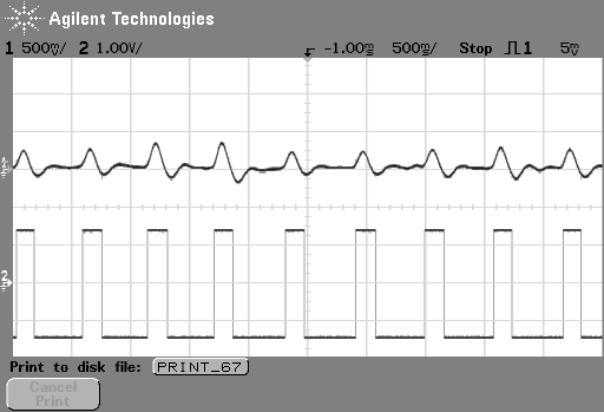
Dieses Oszilloskopbild zeigt die gleichen Signale wie im
Beispiel zuvor. Der Unterschied liegt in der Pulsfrequenz der Person und der
aufgenommenen Signalform.
Die Signalform ist von Testperson zu Testperson unterschiedlich.
Anlage E : Layout Bestückungsseite / Lötseite
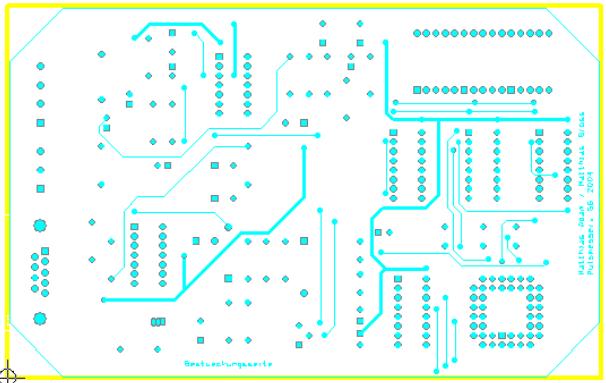
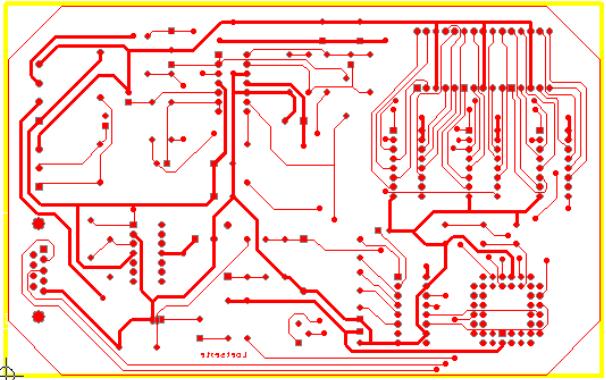
Anlage E : Bestückungsplan
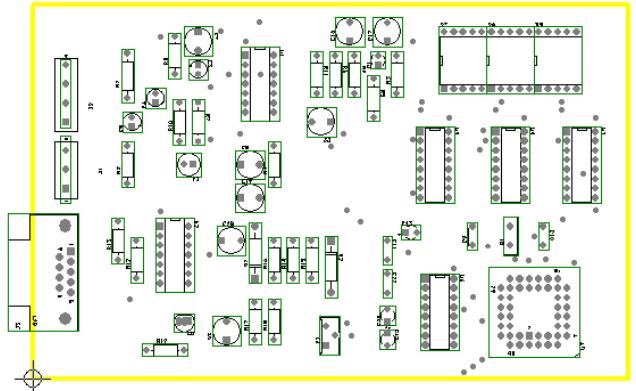
In den Layouts für die Bestückungsseite und die Lötseite sind nur die
Leiterbahnen für die Verbindungen der einzelnen Bauteile zu sehen. Es wurde
jedoch jeder freie Platz mit einer Kupferschicht bedeckt, die das Potential GND
hat. So ist die Schaltung vor Störeinflüssen besser geschützt.
Anlage F : Zeichnung
der Fingerklammer
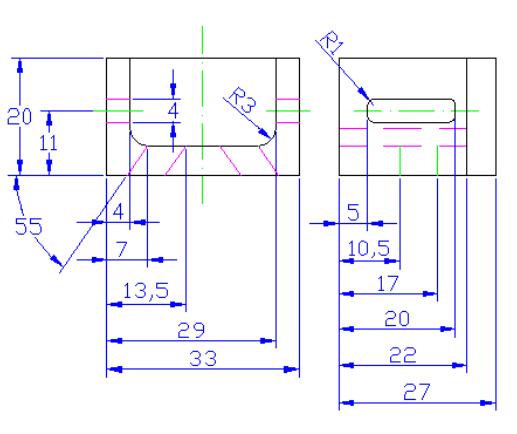
Dies war der erste Entwurf einer Fingerklammer, in der der
Fototransistor und die Leuchtdiode von unten in einem Winkel von 708
befestigt sind.
Die Anordnung war für die Reflexlichtmethode bestimmt.
Die Fixierung der Klammer am Finger wird durch ein Gummiband
mit Klettverschluss realisiert, das seitlich durch die Langlöcher geführt wird.
Testreihen mit verschiedenen Versuchspersonen haben jedoch
gezeigt, dass die Durchlichtmethode am kleinen Finger allgemein am besten
funktioniert. Bei manchen Personen konnte mit der Reflexmethode überhaupt kein
Puls festgestellt werden.
Aus diesem Grund haben wir uns schließlich für die
Durchlichtmethode entschieden. Der Halter für diese Methode wird durch eine
handelsübliche Aktenklammer realisiert, die nahezu in jedem
Schreibwarengeschäft erhältlich ist. Die Diode und der Fototransistor werden
durch zwei gegenüberliegende Bohrungen aufgenommen.