
Fachhochschule Aalen
Hochschule für Technik und Wirtschaft
Studiengang Mikro- und
Feinwerktechnik / Mechatronik
Studienarbeit
Aufbau von drei
mechatronischen Robotern
Betreuer:
Professor Dipl.-Phys.
Dipl.-Ing. Edmund R. Schiessle
Studenten:
Simon
Hörner und Joachim Walter
Wintersemester
2001/2002
Inhalt:
1.
|
Geschichte und Zukunft der
Roboter
|
3
|
1.1.
|
Was
ist ein Roboter?
|
3
|
1.2.
|
Geschichte des Roboters |
3
|
1.3.
|
Zeitgenössische
und künftige Roboter
|
5
|
|
|
|
|
2.
|
Moon Walker II
|
6
|
2.1.
|
Elektronik
|
6
|
2.2.
|
Mechanik
|
8
|
|
|
|
|
3.
|
Hyper Peppy II
|
9
|
3.1.
|
Elektronik
|
9
|
3.2.
|
Mechanik
|
11
|
|
|
|
|
4.
|
Avoider III
|
12
|
4.1.
|
Elektronik
|
12
|
4.2.
|
Mechanik
|
15
|
|
|
|
|
5.
|
Was macht diese 3
mechatronischen Maschinen zum Roboter ?
|
16
|
|
|
|
|



1.
Geschichte und Zukunft der Roboter
1.1.
Was ist ein Roboter?
Roboter
sind in der modernen Gesellschaft allgegenwärtig. Man findet sie in
verschiedenen Einsatzgebieten. Meist bekannt sind Roboter jedoch aus der
Industrie.
Was
aber macht einen Roboter zu einem Roboter? Im Lexikon findet man dazu
folgendes:
-
eine durch Menschen
hergestellte Maschine, die mit komplizierter Technik
funktioniert, bzw. ein künstlicher Mensch.
-
Maschinen, die nach den
gleichen Prinzipien selbständig, d.h. ohne
menschliche Eingriffe, funktionieren.
Diese
Beschreibung liefert jedoch noch keine ausreichende Antwort auf die Frage.
Deshalb betrachten wir noch die wissenschaftliche Definition:
Seit
geraumer Zeit zählt man sogenannte Automaten, wie diese in der Industrie
verwendet werden, ebenfalls zu den Robotern. Vorher hatten die Roboter vor
allem eine menschliche Gestalt.
Das
Wort Roboter stammt ursprünglich aus der tschechischen Sprache und bedeutet
soviel wie „erzwungene Arbeit“.
1.2.
Geschichte
des Roboters
a) Roboter in der Literatur
Die
Idee des Roboters ist bereits seit uralter Zeit aus den Mythen und der
Literatur vor Christus bekannt.
Der
Mensch hat damals schon nach Maschinen gesucht, die ihm die Arbeit abnehmen
können.
So
gibt es das goldene Mädchen in einer griechischen Mythe aus dem 8. Jh. Vor
Christus und den bronzenen Teufel Talos aus dem dritten Jh. Vor Christus. Der
griechische Erfinder Heron aus dem Altertum baute eine Automatiktür, wie auch
wir sie heute noch benutzen.
Im
18. Jh. Hat ein Franzose namens Beaukersen eine künstliche Ente angefertigt,
welche baden, essen, weinen und sogar Exkremente produzieren konnte.
Aus
dem 19. Jh. kennen wir die ersten Bücher über Roboterbau: eine populäre
Beschreibung mit Abbildung eines künstlichen Wesens das mit Menschen kämpft.
b) Der Fortschritt der Wissenschaft, Technologie und
Roboter
Mit
dem Fortschritt der Wissenschaft entwickelten sich die bisherigen „Spielzeuge“
zu Robotern. Obwohl den modernen Automaten noch eindeutig unterlegen und mit
der modernen Mechatronik noch nicht vergleichbar, wurden die Roboter bereits
aus einer Kombination von mechanischen und elektrischen Teilen aufgebaut.
Auf
der Weltausstellung von 1927 in New York, konnte die amerikanische Firma
Westinghouse den Roboter „Willy“ vorführen. Willy konnte spazieren, reden, mit
den Augen blinzeln und Farben erkennen Der Hersteller hatte den Roboter als
Hilfe für den Menschen entworfen, aber das Gerät hatte einen eingeschränkten
Bewegungsbereich.
In
den Anfangsjahren des 20. Jh. präsentierte Isaac Asimov seine „drei Grundlagen
zur Herstellung eines Roboters“. Mit seiner Definition verschwindet die
Unklarheit und Unsicherheit bei der Definition des Roboters.
Diese
3 Grundlagen sind:
1.
Roboter dürfen Menschen keinen Schmerz zufügen oder
den Menschen, dem Schmerz zugefügt
wird, ignorieren.
2.
Roboter müssen Befehle von Menschen gehorchen,
solange Regel 1 nicht verletzt wird.
3.
Roboter müssen sich selbst schützen, solange Regel 1
und 2 nicht verletzt werden.
c) Der Stand der heutigen Technik
Die
modernen Roboter basieren auf dem Fortschritt der Computer- und Steuerungstechnik,
die bereits während dem zweiten Weltkrieg aufgebaut wurde. In diesem Zeitraum
wurden die Vakuumröhren der Elektronik und Kommunikationstechnologie erheblich
verbessert. Diese Entwicklung bildet das Fundament für die modernen Roboter,
obwohl die Röhren für den Roboterbau ungeeignet sind.
An
Roboter stellen wir heute Mindestanforderungen. So darf der Roboter nicht nur
eine Handlung verrichten. Er muss vielmehr durch geeignete Programmierung
mehrere Aufgaben beherrschen. Der Computer bildet dabei das Gehirn des Roboters
und deshalb ist der Fortschritt in der Computertechnologie von großer
Bedeutung.
Der
erste Schritt zur Beseitigung der Mängel der Röhren war die Einführung der
Transistoren und Dioden. Transistoren ersetzen die Funktionen der meisten
Röhren.
Diese
Erfindung hat die Zuverlässigkeit der Computer verbessert.
1.3.
Zeitgenössische
und künftige Roboter
Stand
der Technik im Roboterbau:
Die
Entwicklung der Technik macht die Umsetzung der Roboteridee möglich. Roboter
verhalten sich teilweise wie Menschen, aber der Unterschied ist deutlich
sichtbar.
Hier
einige Beispiele für heutige Roboter:
a) Industrieroboter
Industrieroboter
sind in der Regel Mechaniksysteme die gefährliche oder gesundheitsschädliche Arbeiten
vom Menschen übernehmen. Diese Robotertypen wurden bereits in den 50er und 60er
Jahren in großen Stückzahlen gefertigt.
Robotergreifer
stehen in einfacher bis sehr komplexer Form und in vielerlei Ausführungen zur
Verfügung.
Zur
Steuerung werden Mikroprozessoren verwendet.
b) Übrige
Industrieroboter
Neben
den Industrierobotern setzt die Wissenschaft Roboter auch in der Forschung ein.
Typische Beispiele sind die Nuklear- und Tiefseeforschung.
c) Intelligente
Roboter
Intelligente
Roboter übernehmen komplexe Aufgabe vom Menschen. In wieweit Roboter solche
Aufgaben übernehmen können ist noch nicht geklärt. Die Umsetzung dieser Idee
ist nicht so einfach wie es scheint.
d) Übrige
Robotertypen
Auch
in der Medizin spielen Roboter eine wichtige Rolle. So simulieren Roboter für
Medizinstudenten den menschlichen Patienten, damit die Studenten ihre ersten
Gehversuche auf dem Gebiet der Anästhesie, Herzmassage, Beatmung und das
Anlegen einer Infusion nicht am Menschen ausprobieren müssen.
Sensoren
simulieren dabei menschliche Züge.
Künftige Roboter:
Sehr
erwünschte Robotertypen wären Hilfspfleger, welche uns bei der Versorgung
Bettlägeriger helfen könnten. Außerdem besteht die Hoffnung auf den Einsatz der
Roboter bei der Rettung von Mensch und Tier aus brennenden Gebäuden.
Roboter
dürfen bei alledem nie nur aus Kostengründen eingesetzt werden. Die Industrie
muss neben der Effizienz auch die Beziehung zwischen Technologie und Kultur
berücksichtigen. Das Ziel beim Einsatz der Computer und Robotertechnologie ist
die materielle und geistige Evolution auf dem Gebiet der menschlichen
Gesellschaft und seine Arbeitswelt.
2.
Moon Walker II :
 Elektronischer
Roboter mit 2 integrierten Sensoren, die auf Geräusche und sich ändernde
Lichtstärke reagieren.
Elektronischer
Roboter mit 2 integrierten Sensoren, die auf Geräusche und sich ändernde
Lichtstärke reagieren.
Beim Auftreten eines Geräuschs ( z.B.
Klatschen ) oder bei einer Änderung der Lichtstärke lösen die Sensoren eine
einige Sekunden dauernde Vorwärtsbewegung aus.
Spezifikation:
Antrieb: 1 Elektromotor
Spannung: 1,5 Volt Batterie
Stromverbrauch: ca.
200 mA
Laufbewegung: vorwärts ( » 10 Sekunden )
Abmessungen: Höhe 130 mm
Durchmesser
100 mm
Gewicht:
170 g
2.1. Elektronik:
Die Elektronik besteht aus
verschiedenen Teilschaltungen:
- Mikrofonblock
- Lichtsensorblock
- Verstärker- und Verzögerungsblock
- Motorsteuerung
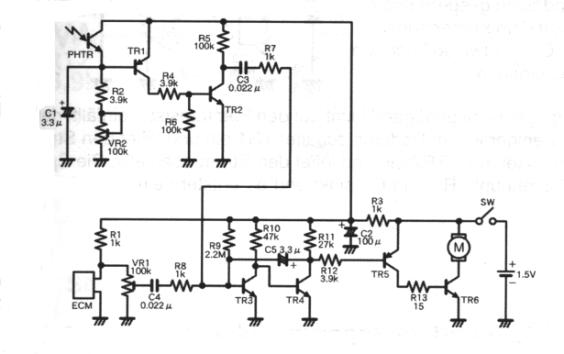
Mikrofonblock:
R1, R8, C4, VR1, ECM
Die
Betriebsspannung wird dem Kondensatormikrofon über den Widerstand R1 aus der
Batterie zugeführt. Der Regelwiderstand VR1 sorgt für die Empfindlichkeit,
womit das Geräusch verarbeitet wird.
Lichtsensorblock:
R2,
R4, R5, R6, R7, C1, C3, VR2, TR1, TR2, PHTR
Bei
ausreichendem Licht ist der Phototransistor PHTR eingeschaltet und leitet den
Strom. TR1 und TR2 sind dann gesperrt und die Spannung auf dem Knotenpunkt von
R5 und C3 ist etwa so hoch wie die Batteriespannung.
Wenn
nicht genügend Licht auf den Phototransistor einfällt, dann wird PHTR weniger
leitend. Dadurch schaltet TR1 und damit auch TR2 ein. Die Spannung am
Knotenpunkt R5 und C3 sinkt und es entsteht ein kurzer Impuls über C3.
Verstärker-
und Verzögerungsblock:
R9,
R10, R11, C5, TR3, TR4
Im
Normalfall sind die Transistoren TR3 und TR4 gesperrt und der Ausgang ist
„High“ (1,5 Volt).
Die
Transistoren TR3 und TR4 funktionieren wie ein Zeitschalter, der auf einen
Impuls reagiert. Wenn eine positive Spannung an der Basis von TR3 anliegt, wird
dieser leitend. Auch TR4 wird leitend und der Ausgang dieses Blocks wird „Low“
(0 Volt).
Eine
positive Rückkopplungsschleife leitet über C5 ein Impulssignal zurück auf die
Basis von TR3 und sorgt dafür, dass der Ausgang noch einige Sekunden „Low“
bleibt. Elko C5 ist für die Verzögerung zuständig.
Motorsteuerung:
R12,
R13, TR5, TR6
Der
Timer kann den Motor nicht direkt ansteuern. Die Motorsteuerung verstärkt den
Strom und versorgt den Motor mit einer ausreichenden Stromstärke und der
korrekten Stromrichtung. Wenn der Timerausgang „High“ ist (normal), sind TR5
und TR6 gesperrt und der Motor steht. Wenn der Timerausgang sinkt, werden die
Transistoren TR5 und TR6 eingeschaltet. Der Motor beginnt zu drehen.
Der
RC-Filter bestehend aus R3 und C2 entfernt Störimpulse, die der Motor
verursacht.
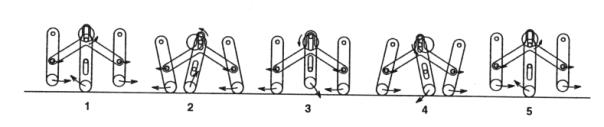
2.2. Mechanik:
Die
Beinbewegung:
Vier
Beine, je zwei auf einer Seite, bewegen den Moonwalker II. Auf jeder Seite
befindet sich ebenfalls eine Kurbel, die eine Drehbewegung in eine seitliche
Bewegung umsetzt. Das Vorderbein ist mechanisch mit der Kurbel verbunden und
bewegt sich vor und zurück, wenn sich die Kurbel dreht.
Das
Hinterbein ist mit der Kurbel direkt verbunden. Wenn sich die Kurbel dreht,
sorgt die Nut in der Beinseite dafür, dass das Bein sich stetig bewegt. Beim
Drehen der Kurbel beschreibt die Unterseite des Beins eine kleine Ellipse.
Wenn
die Hinterbeine sich in dieser Ellipsenform bewegen, müssten sie sich auch
anheben. Statt dessen erheben sich aber die Vorderbeine, weil die Hinterbeine
länger und schwerer sind.
Die
Vorderbeine machen einen Schritt nach vorne, so dass das Gewicht sich auf die
Vorderbeine verlagert und diese den Boden berühren. Die Gummiräder in den
Vorderbeinen sorgen dafür, dass der Roboter nicht ausrutscht beim Gehen. Da die
Kurbeln mit einem Versatz von 180° eingebaut wurden, bewegen sich die zwei
Hälften des Roboters genau im Takt nacheinander.
3. Hyper Peppy II :

Elektronischer Roboter mit einem
integrierten Sensor welcher auf Geräusche und Berührung reagiert. Der Roboter
fährt solange geradeaus bis ein Geräusch auftritt oder ein Zusammenstoss mit
einem Gegenstand erfolgt. Anschließend fährt er eine vorprogrammierte Zeit
rückwärts, legt dabei eine Linkskurve ein ( durch Kippen des Vorderrades bis zu
einem gegebenen Anschlag ) und fährt dann wieder geradeaus.
Spezifikation:
Antrieb: 1 Elektromotor
Spannung: 2 x 1,5 Volt
Batterie
Stromverbrauch: Elektronik
ca.10 mA
Antrieb
ca. 400 mA
Abmessungen: Höhe 90 mm
Länge 115 mm
Breite 130 mm
Gewicht: 160 g
3.1. Elektronik:
Die
Elektronik besteht aus verschiedenen Teilschaltungen:
- Mikrofonblock
- Verstärker- und
Verzögerungsblock
- Stromverstärkerblock
- Motorsteuerung
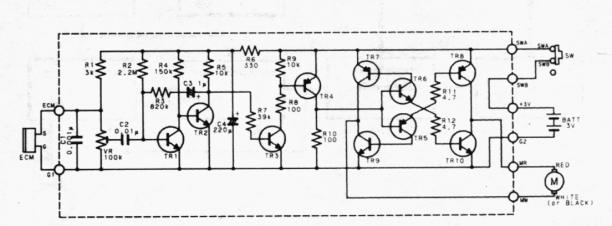
Mikrofonblock:
R1,
C1, ECM
Das
Kondensatormikrofon wird mit der Betriebsspannung aus der Batterie versorgt.
Diese wird über den Widerstand R1 zugeführt. Der Kondensator C1 sorgt für die
Verbesserung des Mikrofonsignals.
Verstärker-
und Verzögerungsblock:
R2,
R3, R4, R5, C2, C3, VR, TR1, TR2
Der
Transistor TR1 leitet, falls kein Mikrofonsignal anliegt. Dabei liegt an der Basis
von TR2 nur eine geringe Spannung und an dessen Kollektor etwa 2 Volt. Der
Transistor TR2 sperrt.
Bei
einem Signal vom Mikrofon wird TR1 kurz ausgeschaltet. Dabei wird TR2 leitend.
Am Kollektor von TR2 sinkt die Spannung auf etwa 1 Volt.
Die
Transistoren TR1 und TR2 bilden zusammen mit dem Mikrofon einen
geräusch-empfindlichen Schalter. Eine positive Rückkopplungsschleife leitet
über C3 und R3 ein Impulssignal zurück auf die Basis von TR1 und sorgt dafür,
dass der Ausgang noch einige Sekunden niedrig bleibt. Elko C3 ist zusammen mit
R3 zuständig für die Verzögerung beim Umschalten von „High“ auf „Low“.
Stromverstärkerblock:
R7,
R8, R9, R10, TR3, TR4
Der
kleine Stromimpuls aus der ersten Stufe wird verstärkt. Die Transistoren TR3
und TR4 sind als Verstärkerstufen in Reihe geschaltet.
Motorsteuerung:
R11,
R12, TR5, TR6, TR7, TR8, TR9, TR10
Dieser
Block versorgt den Motor mit einer ausreichenden Stromstärke und mit der
korrekten Stromrichtung.
Falls
der Roboter vorwärts fährt, fließt der Strom über MR durch den Motor nach MW.
Die Transistoren TR6, TR7 und TR10 sind eingeschaltet, da der Eingang zwischen
TR5 und TR6 „High“ ist. Die übrigen Transistoren sind gesperrt.
Beim
Rückwärtsfahren fließt der Strom über MW durch den Motor nach MR. Der Eingang
ist in diesem Fall „Low“ und dabei sind die Transistoren TR5, TR8 und TR9
eingeschaltet. Die übrigen Transistoren sind gesperrt.
Der
RC-Filter bestehend aus R6 und C4 entfernt Störimpulse, die der Motor
verursacht.
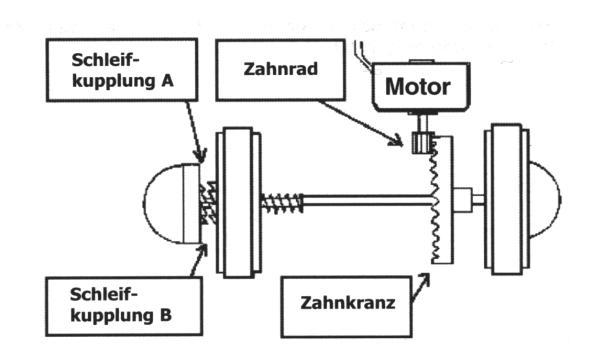
3.2. Mechanik:
Das
Vorderrad des Roboters ist drehbar. Am linken Hinterrad ist eine
Schleifkupplung angebracht. Dies ermöglicht dem Roboter beim Rückwärtsfahren
eine Kreisbewegung zu beschreiben. Dabei schwenkt sich das Vorderrad und das
linke Hinterrad bleibt stehen. Das rechte Hinterrad läuft um das Linke herum.
Die
Schleifkupplung sichert, dass die Räder im Vorwärtsgang miteinander fixiert
bleiben, so dass der Roboter vorwärts fährt. Im Rückwärtsgang wird die
Fixierung gelöst und der Roboter kann eine Kurve drehen, ohne dass die Räder
blockieren.
4. Avoider III :
 Elektronischer
Roboter mit integriertem Lichtsensor und einer Leuchtdiode. Der Roboter läuft
auf sechs Beinen und reagiert auf das reflektierte Licht der LED. So umgeht er
Hindernisse die sich ihm in den Weg stellen.
Elektronischer
Roboter mit integriertem Lichtsensor und einer Leuchtdiode. Der Roboter läuft
auf sechs Beinen und reagiert auf das reflektierte Licht der LED. So umgeht er
Hindernisse die sich ihm in den Weg stellen.
Spezifikation:
Antrieb: 2 Elektromotoren
Spannung: 2 x 1,5 Volt Batterie
Stromverbrauch: Elektronik
ca. 7 mA
Antrieb
ca. 230 mA
Abmessungen: Höhe 110 mm
Länge
140 mm
Breite
100 mm
Gewicht: 190 g
4.1. Elektronik:
Die
Elektronik besteht aus verschiedenen Teilschaltungen:
- Sendemodul
- Empfängermodul
- Verstärkermodul
- Gleichrichtermodul
- Timermodul
- Umpolungsmodul
- Motorantriebsmodul
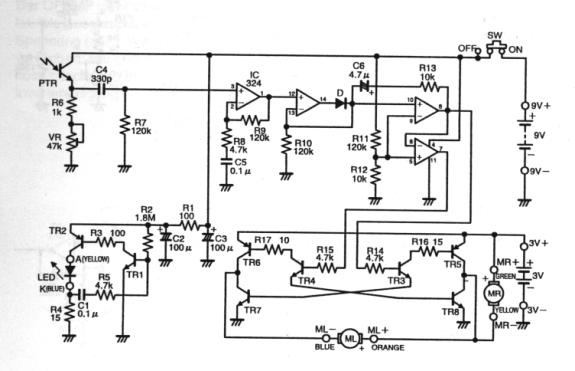
Sendemodul:
R1, R2, R3, R4, R5, C1, C2,
C3, TR1, TR2, LED
Dieses
Modul strahlt mit einer LED intensive Lichtimpulse ab. Damit wird kurzzeitig
eine hohe Lichtintensität bei geringer Batterieleistung erreicht. TR1 und TR2
bilden zusammen einen Oszillator und schalten die LED mit einer festen
Frequenz, die durch C1 und den Widerständen in der Oszillatorschaltung
festgelegt wird.
Die
Elkos C2, C3 und der Widerstand R1 bilden zusammen einen Filter. Dieser
bewirkt, dass die Taktsignale vom LED-Oszillator nicht als Störsignale in die
übrigen Elektronikschaltungen durchdringen.
Empfängermodul:
R6,
R7, C4, VR, PTR
Wenn
die Lichtimpulse von der LED in einem Gegenstand reflektiert werden und eine
minimale Leuchtstärke erreichen, wird der Phototransistor diese Signale
empfangen. Die Stromstärke im Phototransistor wird sich nun im Takt der
ausgestrahlten Lichtimpulse ändern. C4 leitet diese Signale an den Verstärker
weiter, blockiert aber einen Gleichstromfluss zum Verstärkereingang. Der
Kondensator C4 und der Widerstand R7 bilden zusammen einen Filter, der die
Schaltimpulse gut weiterleitet und eventuelle Störsignale unterdrückt.
Verstärkermodul:
R8,
R9, C5, IC1
Die
Impulse aus dem Empfängermodul sind zu schwach für die Motorsteuerung und
müssen zuerst verstärkt werden. Der OP fungiert als Verstärker, wobei die
Verstärkung durch das Verhältnis der beiden Widerstände R8 und R9 festgelegt
wird.
Gleichrichtermodul:
R10,
D, IC4
Das
Ausgangssignal des Impulsverstärkers ist ein Schaltimpuls. Dieser Impuls ist
für die weitere Signalverarbeitung ungeeignet. Mit einer Gleichrichterdiode
wird dieses Signal in eine Gleichspannung umwandelt. Der OP wird nicht als
Verstärker eingesetzt. Er stabilisiert die Ausgangsspannung. Wenn die Impulse
eine minimale Schwelle überschreiten (0,6 V), wird das Ausgangssignal nach der
Diode „High“.
Timermodul:
R10,
R11, R12, R13, C6, IC3
Dieser
Taktgeber verhindert, dass der Motor unmittelbar seine Drehrichtung wechselt,
nachdem der Sensor keine reflektierten Lichtsignale mehr empfängt. Dadurch kann
der AVOIDER die Versperrungen auf seinem Weg leichter umgehen. Die
RC-Kombination C6 und R19 im Rückkopplungszweig des OPs legt die
Verzögerungszeit fest. Der Elko benötigt eine gewisse Ladezeit. Während dieser
Zeit bleibt der Timerausgang auf „High“.
Umpolungsmodul:
R11,
R12, IC2
Der
OP ist in diesem Modul als Inverter geschaltet. Die Ausgangsspannung des
Timermoduls wird mit einer festen Spannung (ca. 1 Volt) am Spannungsteiler R11
und R12 verglichen. Bei geringerer Timerspannung wird der Inverterausgang auf
„High“ geschaltet. Bei hoher Timerspannung wird die Spannung am Inverterausgang
auf „Low“ geschaltet.
Motorantriebsmodul:
R14,
R15, R16, R17, TR3, TR4, TR5, TR6, TR7, TR8
Dieses
Modul steuert die Stromrichtung der Motoren. Falls die Spannung am Inverterausgang
„Low“ ist, leiten die Transistoren TR4, TR6 und TR8 den Strom und beide Motoren
werden sich drehen. In dieser Schaltposition bewegt sich der AVOIDER vorwärts.
Wenn
der Roboter Lichtsignale empfängt, wird die Ausgangsspannung des Timermoduls
„Low“ und damit der Inverterausgang „High“. In diesem Fall leiten die
Transistoren TR3, TR5 und TR6. In dieser Schaltposition hält der rechte Motor
an und der linke Motor wechselt seine Drehrichtung. Dadurch dreht sich der
AVOIDER rückwärts in einem Kreis. Das Timermodul legt dabei die Dauer des
Rückwärtsgangs fest.
4.2. Mechanik:
Die
Beinbewegung:
Sechs
Beine, jeweils drei auf einer Seite bewegen den AVOIDER III. Auf jeder Seite
befindet sich außerdem eine Kurbel, welche die Drehbewegung in eine Schrittbewegung
umsetzt.
Die
Beine sind über ein Kupplungsglied mit der Kurbel verbunden und bewegen sich
vor- und rückwärts, während die Kurbel sich dreht. Die Kurbel wandelt die
Drehbewegung so in eine Schiebebewegung.
Die
mittleren Beine sind direkt verbunden mit der Kurbel, während die vorderen und
hinteren Beine mit dem Kupplungsglied verbunden sind. Der Führungsstift, der
sich in der Seitenöffnung des mittleren Beines befindet, sorgt dafür, dass
dieses Bein eine saubere Schrittbewegung durchführt. Während die Kurbel sich
dreht, beschreibt der Fuß des mittleren Beines eine kleine Ellipse. Die
vorderen und hinteren Beine bewegen sich, wie die Verbindungsglieder, nur vor-
und rückwärts.
5. Was macht diese 3
mechatronischen Maschinen zum
Roboter ?



Augen
Ohren
è Gehirn è Bewegung
Information Entscheidung
Ein Merkmal eines Roboters ist die Fähigkeit zur elektronischen Informationsverarbeitung und zur entsprechenden Verhaltensweise. Auch wir Menschen reagieren nach diesem Muster. Unsere Sinnesorgane sammeln Informationen, die wir im Gehirn verarbeiten.
Hyper Peppy
Avoider
Moon Walker

Mikrofon Elektronikteil Mechanikteil
Lichtsensor è Schaltung è Getriebe /
Kurbelantrieb
Information
Entscheidung
Die Sinnesorgane der 3 Roboter sind das Mikrofon und der Lichtsensor. Die Roboter verarbeiten die Signale im Elektronikteil und reagieren dementsprechend im Mechanikteil.
Die Sensoren leiten die Informationen
in das Elektronikteil und die Elektronik verarbeitet die Information und
übermittelt ein Kommando an das Mechanikteil. Die Mechanik bewegt den Roboter.